Pseudo Closed Loop
Pseudo Closed Loop | Perfil de posição PtP | |
|---|---|
Modo de operação: 1 | |
5: pseudo Closed Loop | |
Especificação da posição nominal | |
Valor do encoder padronizado para posição. | |
Valor do encoder | |
- O módulo funcional opera no modo "pseudo" controlado.
- O sinal do encoder é sempre avaliado no final de um perfil de deslocamento e uma correção de posição é iniciada através do gerador de perfil.
- O sinal do encoder está incluído no controle de malha fechada.
- O valor nominal do controlador de corrente é gerado pelo gerador de perfil de nível superior.
- A posição atual corresponde ao valor do encoder padronizado para a posição.
- É emitido um valor do encoder.
Estrutura
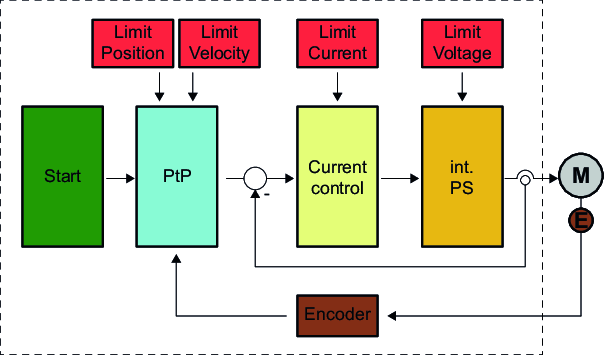
Início | Parâmetros iniciais |
Limit Position | Limitação de posição |
Limit Voltage | Limitação de tensão |
Position control | Controlador de posição |
PI control | Controlador de corrente PI |
M | Motor |
Limit Velocity | limitação de rotação |
Limit Current | Limitação de corrente |
PtP | perfil de posição PtP |
Velocity control | Controlador de rotação |
int. PS | Estágio de potência de saída interno (power stage) |
Encoder | Valor atual do encoder |
Start - Parâmetro Perfil de posição PtP
INFORMAÇÃO

0x8280-01 – Modo de operação nominal 1: perfil de posição PtP |
→
|
Início
|
→
|
PtP Perfil de posição Gerador
|
0x8F00-01 - Configuração da realimentação do encoder 5: Pseudo Closed Loop |
Limit Position – Limitação de posição
|
→
|
Limit Position
|
→
|
PtP Perfil de posição Gerador
| |
Limit - limitação de rotação
|
→
|
Limit Velocity
|
→
|
PtP Perfil de posição Gerador
| |
PtP – Perfil de posição
Limit Position Limitação de posição |
→
|
PtP
|
→
|
Current control Controlador de corrente
|
Limit Velocity limitação de rotação | ||||
Início | ||||
Limit Current – Limitação de corrente
|
→
|
Limit Current
|
→
|
Current control Controlador de corrente
| |
Current control – Controlador de corrente
Limit Current Limitação de corrente |
→ |
Current control |
→ |
int. PS Estágio de potência de saída interno (power stage)
0X8600-02 - Valor atual de corrente 0x8600-10 - Valor atual de corrente da bobinagem A 0x8600-11 - Valor atual de corrente da bobinagem B
|
PtP Perfil de posição Gerador | ||||
Limit Voltage – Limitação de tensão
PS interno – Estágio de potência de saída, motor, encoder
Limit Voltage Limitação de tensão |
→
|
int. PS
|
→
| Motor Encoder 0x8F00-02 - Valor atual do encoder
0x8680-02 - Valor atual da tensão da alimentação de potência |
Current control Controlador de corrente |
