Benzetik kapalı döngü
Benzetik kapalı döngü | PtP pozisyon profili | |
|---|---|
Çalışma şekli: 1 | |
5: Benzetik kapalı döngü | |
İstenen pozisyonun girdisi | |
Pozisyonda standartlaştırılmış enkoder değeri. | |
Enkoder değeri | |
- Fonksiyon modülü "benzetik" kontrollü işletmede çalışır.
- Enkoder sinyali bir hareket profilinin daima sonunda değerlendirilir ve profil üreteci üzerinden bir pozisyon düzeltmesi tetiklenir.
- Enkoder sinyali kontrole dahil olur.
- Akım regülatörü için istenen değer üst seviyedeki profil üreteci tarafından oluşturulur.
- Gerçek pozisyon, pozisyonda standartlaştırılmış enkoder değeridir.
- Bir enkoder değeri verilir.
Yapı
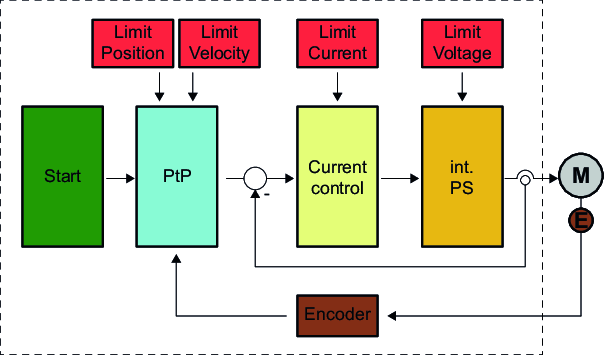
Start | Başlatma parametresi |
Limit Position | Pozisyon sınırı |
Limit Voltage | Gerilim sınırı |
Position control | Pozisyon kontrol ünitesi |
PI control | PI akım regülatörü |
M | Motor |
Limit Velocity | Hız sınırı |
Limit Current | Akım sınırı |
PtP | PtP pozisyon profili |
Velocity control | Hız kontrolörü |
int. PS | Dahili güç çıkış katı (power stage) |
Encoder | Enkoder gerçek değeri |
Başlatma - PtP pozisyon profili parametresi
BİLGİ

0x8280-01 - İstenen çalışma şekli 1: PtP pozisyon profili |
→
|
Start
|
→
|
PtP Pozisyon profili Üreteç
|
0x8F00-01 - Enkoder geribildirimi konfigürasyonu 5: Benzetik kapalı döngü |
Limit Position – Pozisyon sınırı
|
→
|
Limit Position
|
→
|
PtP Pozisyon profili Üreteç
| |
Limit - Hız sınırı
|
→
|
Limit Velocity
|
→
|
PtP Pozisyon profili Üreteç
| |
PtP – Pozisyon profili
Limit Position Pozisyon sınırı |
→
|
PtP
|
→
|
Current control Akım regülatörü
|
Limit Velocity Hız sınırı | ||||
Start | ||||
Limit Current – Akım sınırı
|
→
|
Limit Current
|
→
|
Current control Akım regülatörü
| |
Current control – Akım regülatörü
Limit Current Akım sınırı |
→ |
Current control |
→ |
int. PS Dahili güç çıkış katı (power stage)
0x8600-02 - Akım - Gerçek değer 0x8600-10 - Akım - Sargı A gerçek değeri 0x8600-11 - Akım - Sargı B gerçek değeri
|
PtP Pozisyon profili Üreteç | ||||
Limit Voltage – Gerilim sınırı
|
→
|
Limit Voltage
|
→
|
int. PS Dahili güç çıkış katı (power stage) | |
Dahili PS – Güç çıkış katı, motor, enkoder
Limit Voltage Gerilim sınırı |
→
|
int. PS
|
→
| Motor Enkoder 0x8F00-02 - Enkoder - Gerçek değer
|
Current control Akım regülatörü |
