DELTA_RR/RRR_M10, DELTA_RRRL_M20
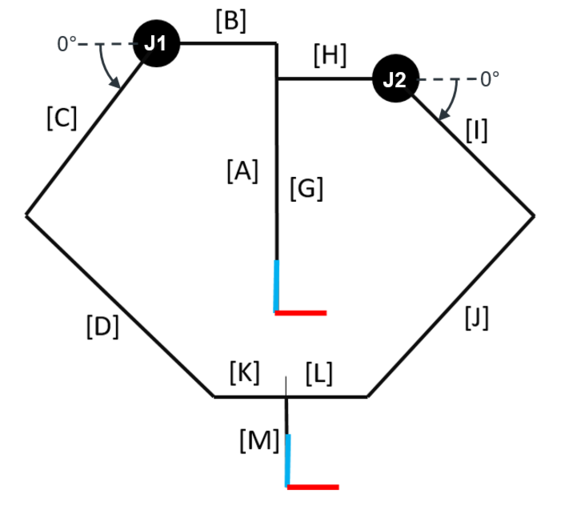
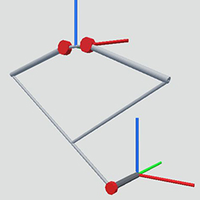
DELTA_RR_M10
Included in the MOVIKIT® Robotics license.
DELTA with 2 rotary axes:
- Joint axes 1 and 2: In combination, they allow translational motion of the tool on the ZX plane. The motion of a joint axis cannot be clearly assigned to the motion of a Cartesian axis.
INFORMATION: The flange orientation is kept constant by means of a parallelogram or a belt, or the tool consists only of a pin, for example, whose orientation is not relevant.
DELTA_RRR_M10
Included in the MOVIKIT® Robotics add-on MediumModels license.
DELTA with 3 rotary axes:
- Joint axes 1 and 2: In combination, they allow translational motion of the tool on the ZX plane. The motion of a joint axis cannot be clearly assigned to the motion of a Cartesian axis.
- Joint axis 3: Rotates the tool around the wrist axis (parallel to the Z-axis).
INFORMATION: The orientation of the fixing point of joint axis 3 is kept constant by a parallelogram or belt.
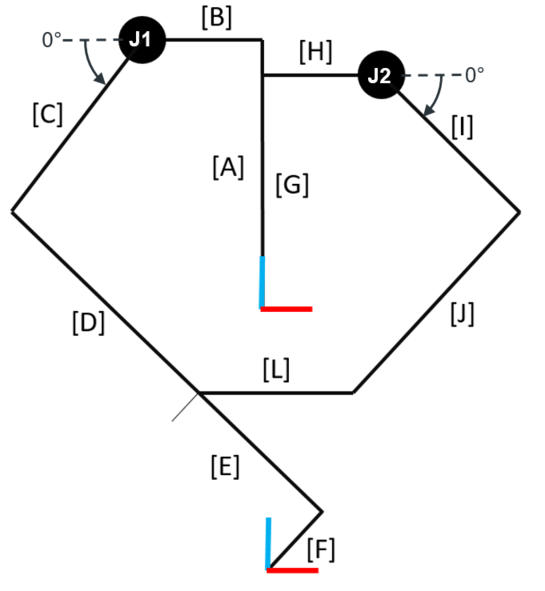
DELTA_RRRL_M20
Included in the MOVIKIT® Robotics add-on MediumModels license.
DELTA with 3 rotary axes and 1 linear axis:
- Joint axes 1 and 2: In combination, they allow translational motion of the tool on the ZX plane. The motion of a joint axis cannot be clearly assigned to the motion of a Cartesian axis.
- Joint axis 3: Rotates the tool around the wrist axis (parallel to the Y-axis).
- Joint axis 4: Moves the tool parallel to the Y-axis.
INFORMATION: If parameters (E) and (F) are both equal to 0, the orientation of the fixing point of joint axis 3 is kept constant by a parallelogram or belt. Otherwise, joint axis 3 is attached to the extension (E) or offset (F) of the upper arm (D) and the X-axis of the flange coordinate system points in the direction of the extension of the upper arm (D) in the zero position of joint axis 3.