DELTA_RRL_M50
Included in the MOVIKIT® Robotics add-on MediumModels license.

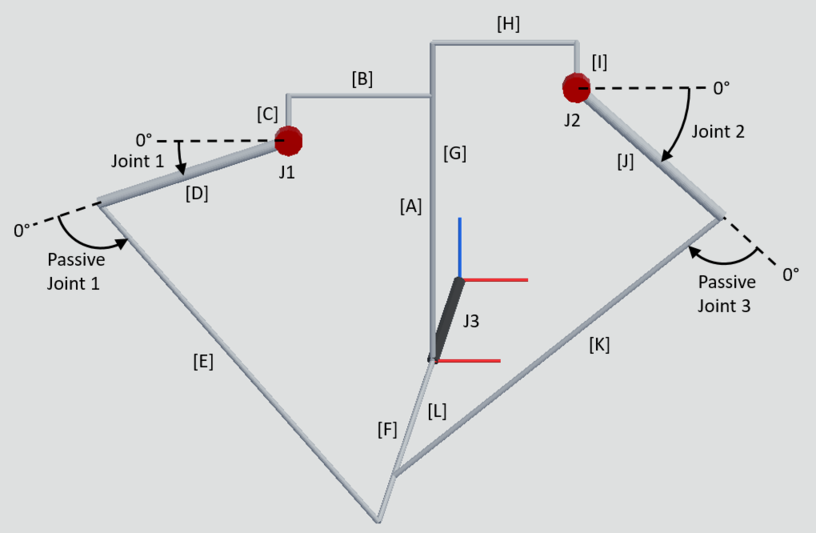
DELTA with 2 rotary axes and 1 linear axis:
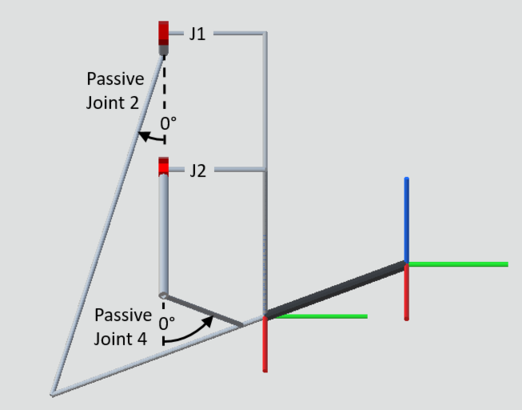
- Joint axes 1 and 2: Rotate one upper arm each in the ZX plane. The forearms use ball joint connections to move a lance, which is in turn pivoted in the origin of the base coordinate system.
- Joint axis 3: Linear extension of the lance for interpolation in the Cartesian space with positive Y coordinates.
INFORMATION: The flange orientation is constantly maintained by means of a parallelogram or a belt, or the tool only comprises a pen, for example; its orientation is not significant.
Additional information