Functional description
Additional information
- Robot states
- Jog mode
- Program mode
- Sets of motion parameters
- G-code
- Repositioning (BackToPath)
- Referencing mode
- Access management
- Simulation
- Software limit switches
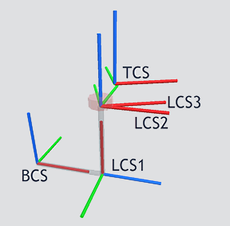
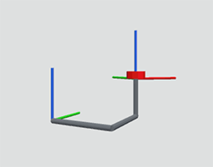
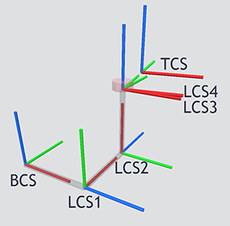
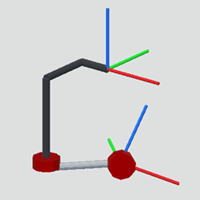
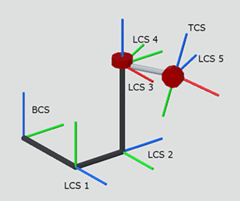
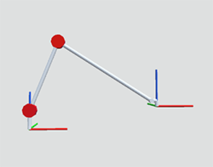
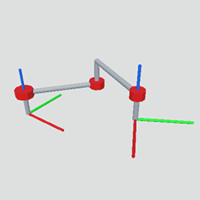
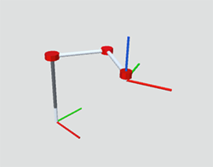
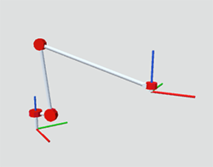
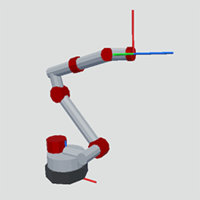
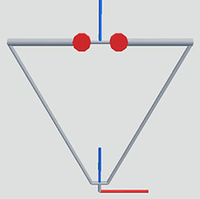
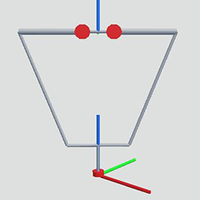
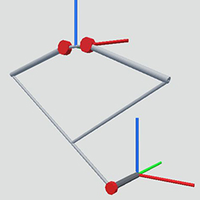
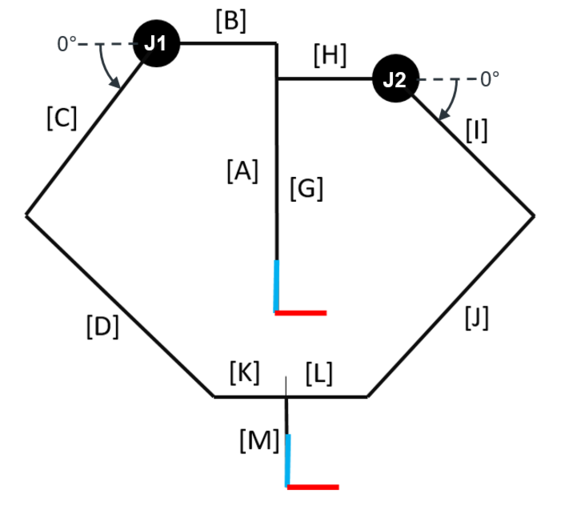
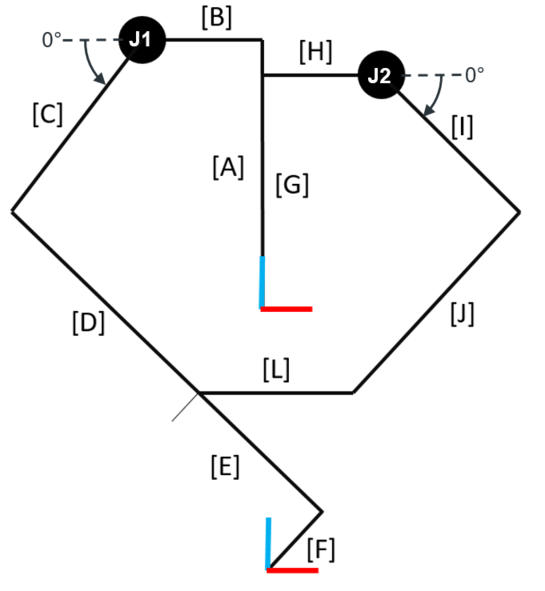
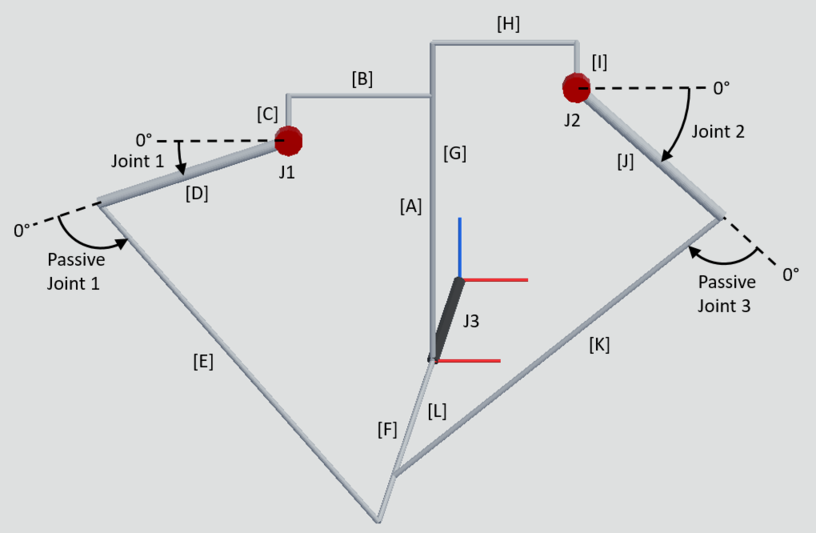
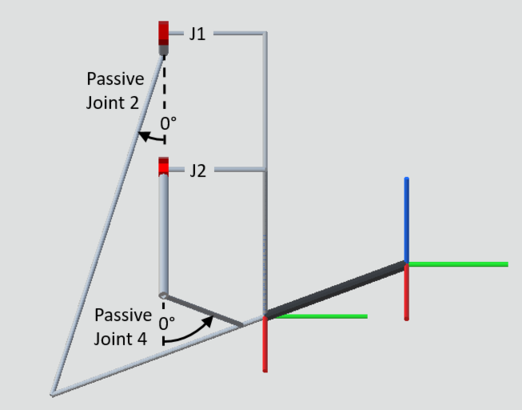
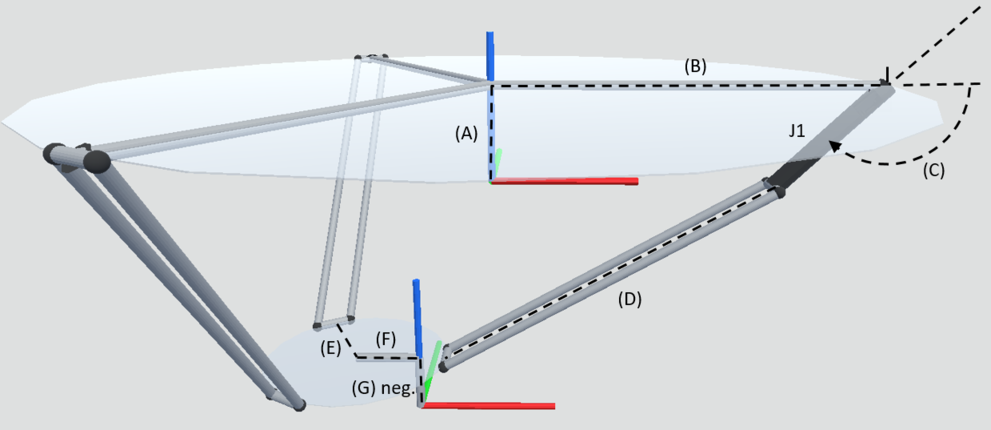
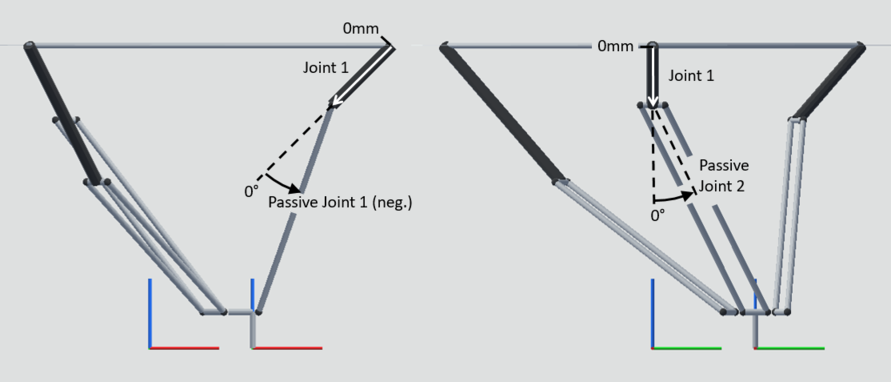
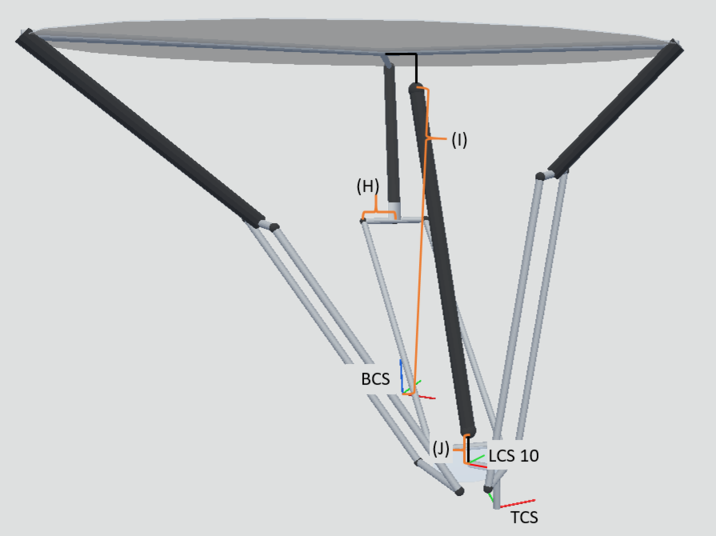
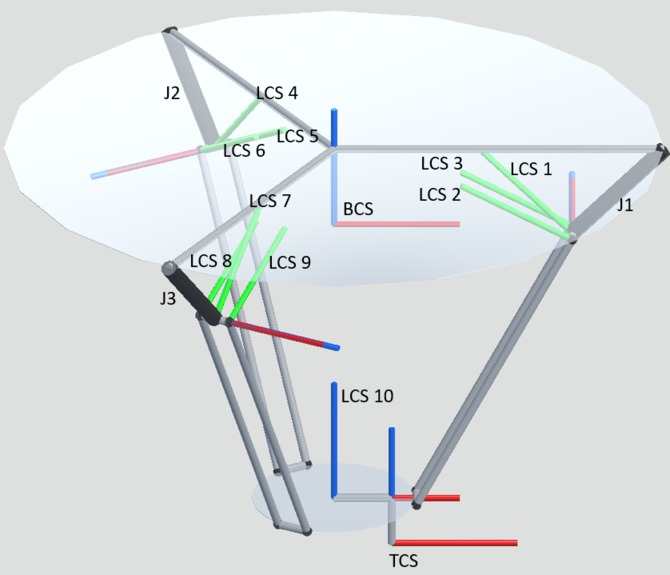
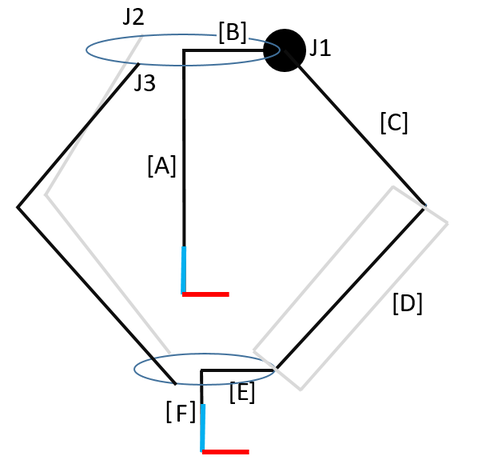
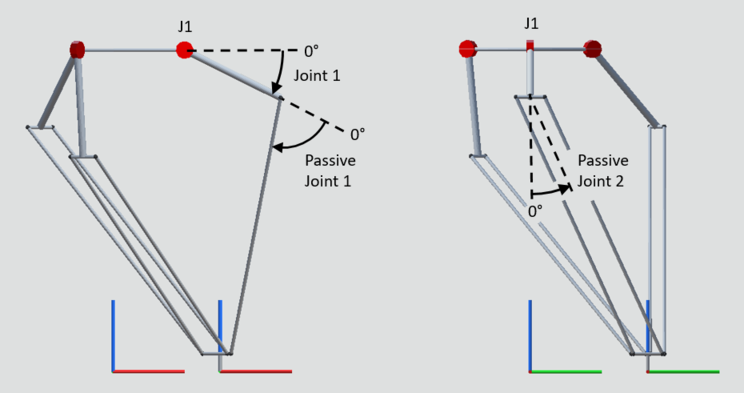
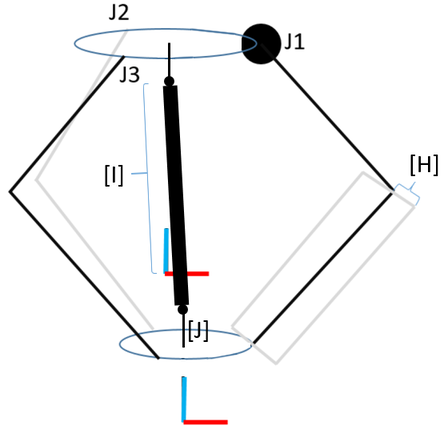
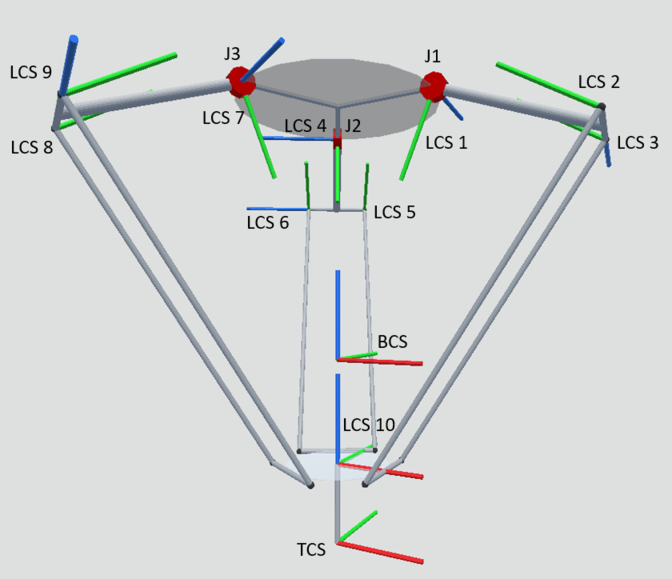
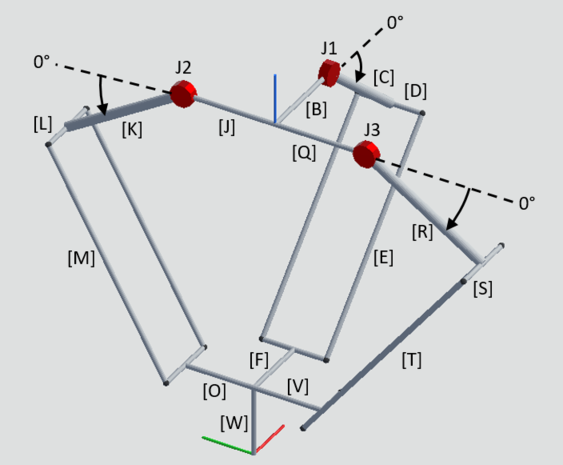
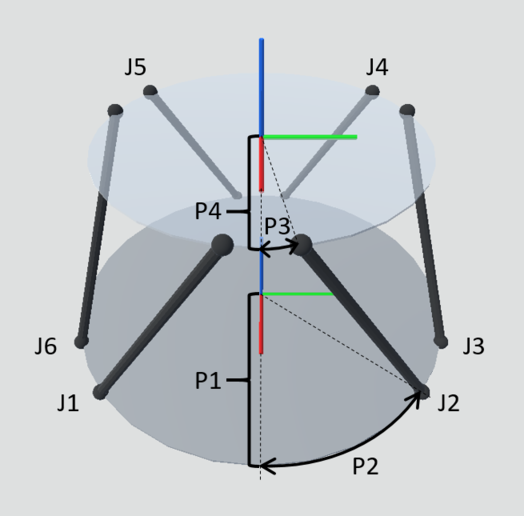
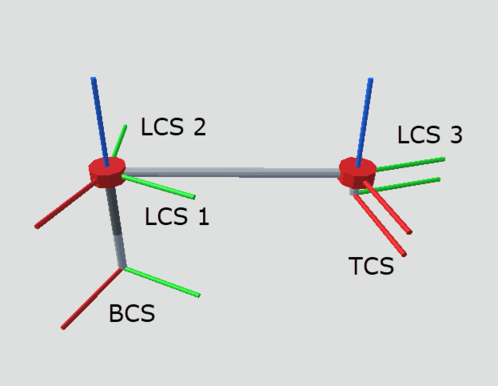
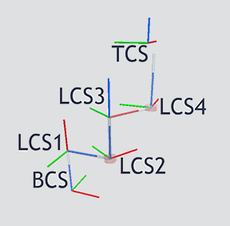
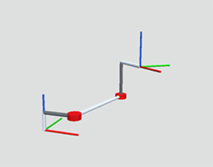
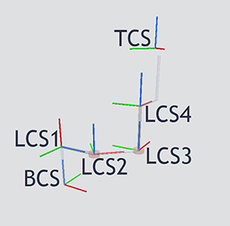
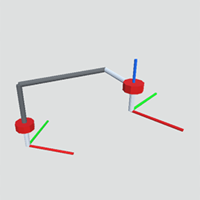
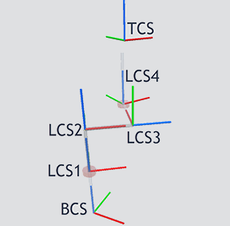
- Kinematic models
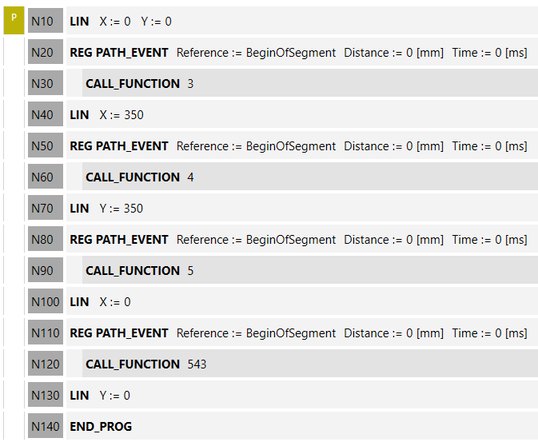
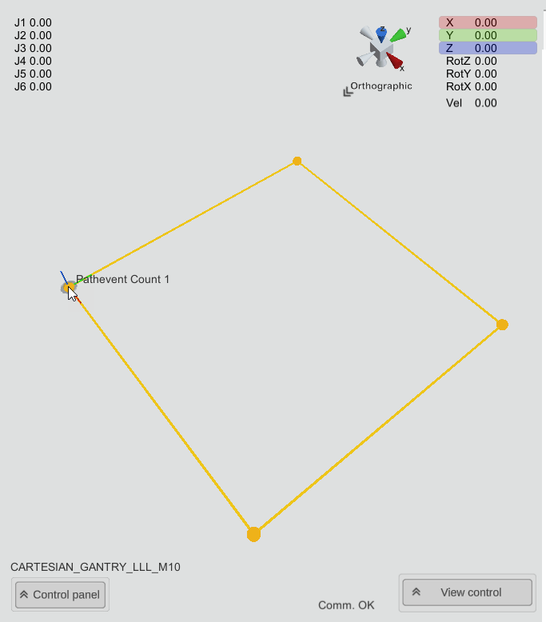
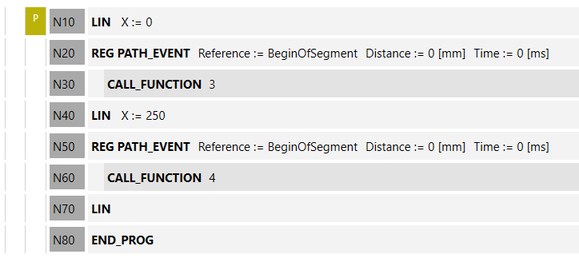
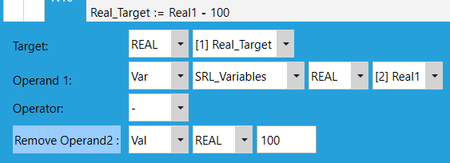
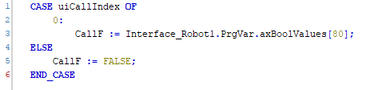
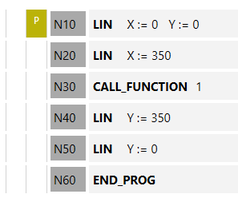
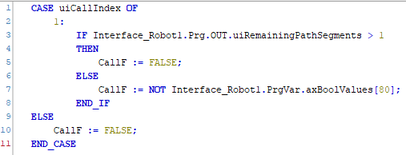
- Path events
- Touchprobe
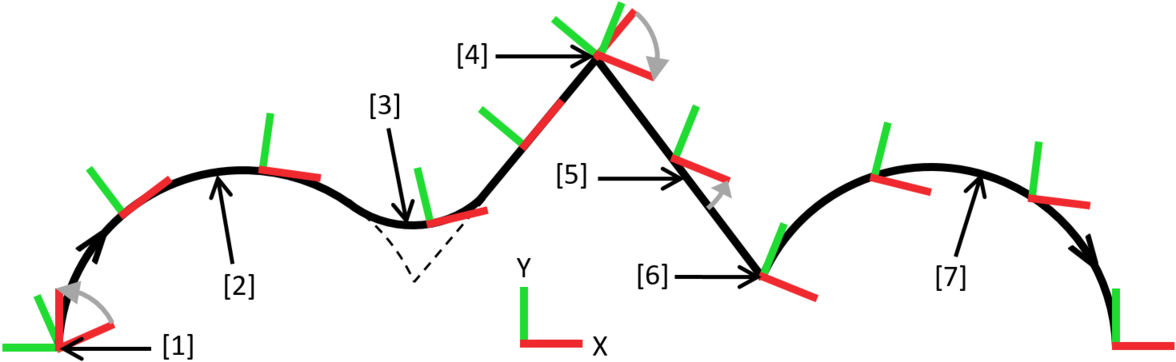
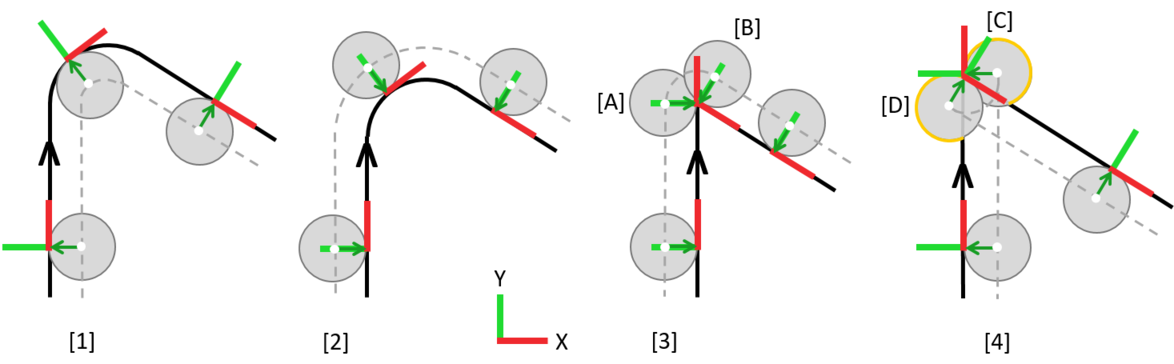
- Tangential control
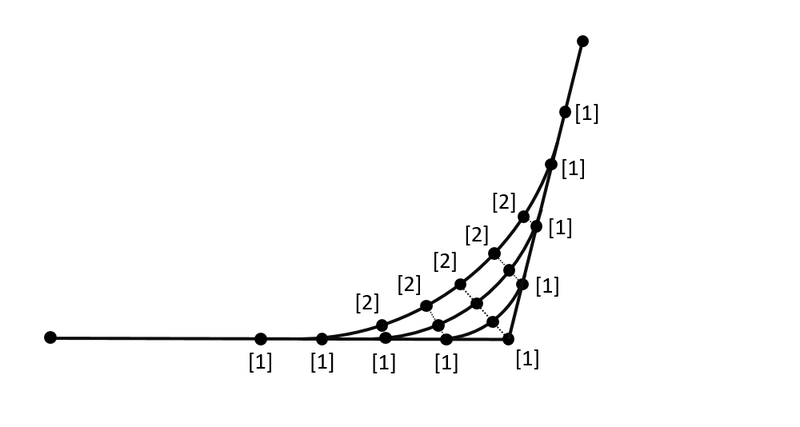
- Circular interpolation
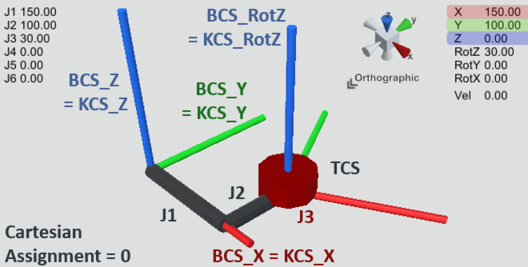
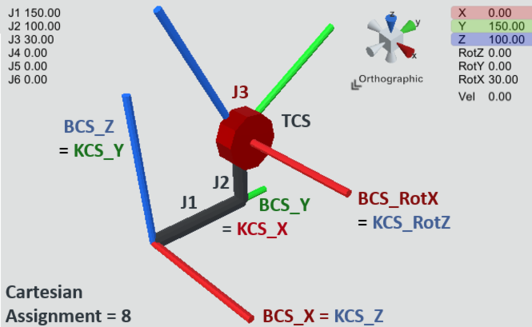
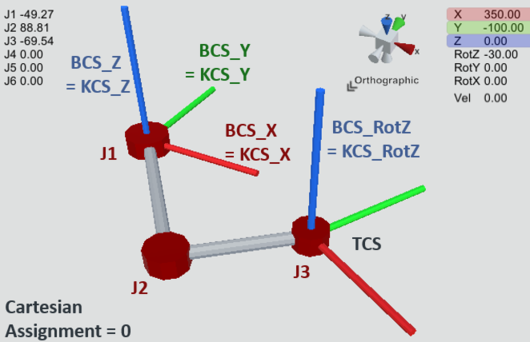
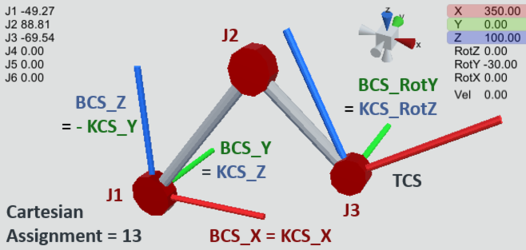
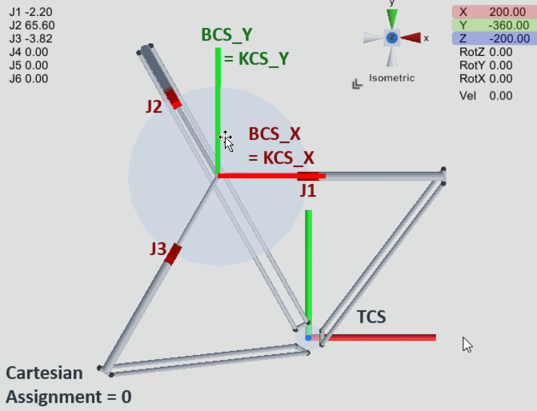
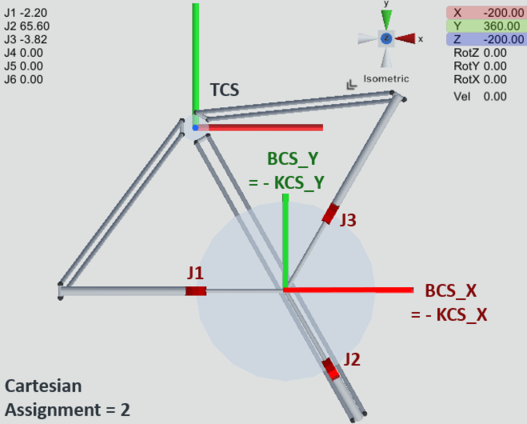
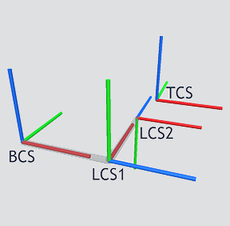
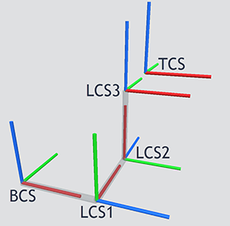
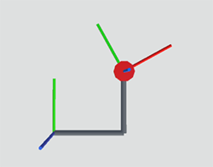
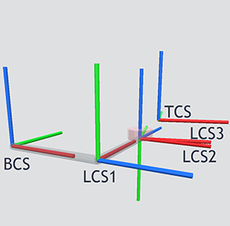
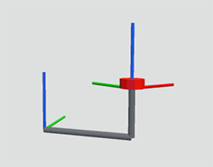
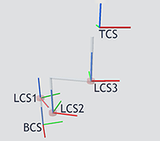
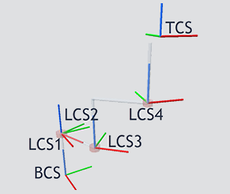
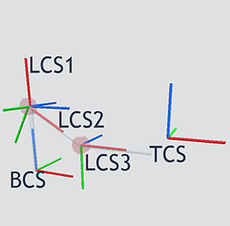
- Static coordinate systems
- Synchronization with moving objects
- Physics simulation
- Combination of cam and robot functionality