Path events
Path events allow for executing an instruction at a parameterizable point in the path progression. The path events are parameterized by specifying a reference point, shifting the reference point using the Distance parameter, and a time offset using the Time parameter. For further information, refer to chapter Path event.
The parameterization of the path event refers to the next path segment in the SRL program and takes place in 3 steps:
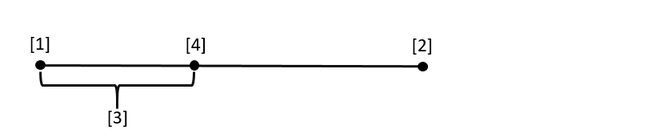
- Specifying a reference point: Starting point or end point of the next path segment in the SRL program. The SRL program is only displayed as error-free in the RobotMonitor when the REG PATH_EVENT registry is followed by a motion command.
- If reference = FALSE: Starting point of the path segment
- If reference = TRUE: End point of the path segment
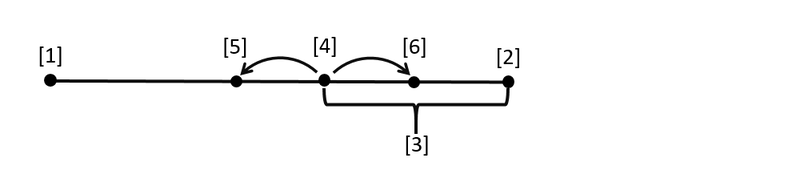
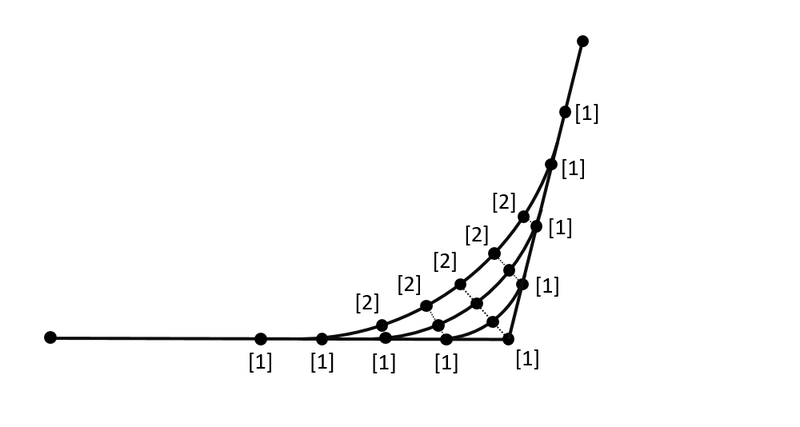
- Shifting the reference point using the Distance parameter in [mm]: The value 0 does not result in a shift of the reference point. A negative value causes the reference point to be shifted forwards in the path progression, i.e. to the beginning of the path. A positive value causes the reference point to be shifted backwards in the path progression, i.e. towards the end of the path.
- If distance = 0: exactly at the reference point
- If distance is negative: in the path progression in front of the reference point
- If distance is positive: in the path progression behind the reference point
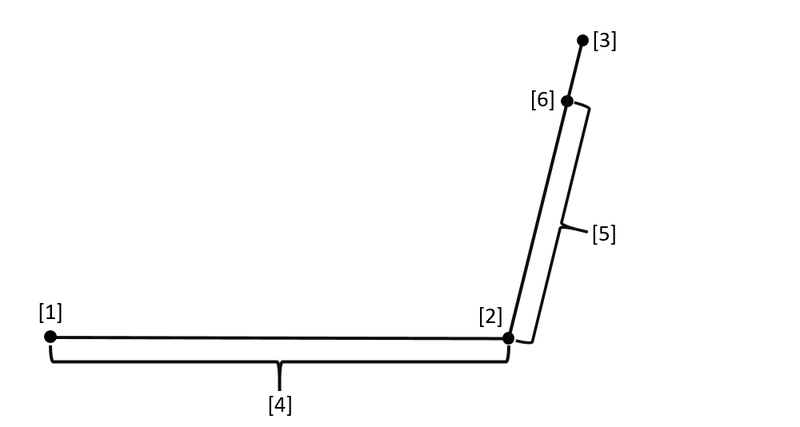
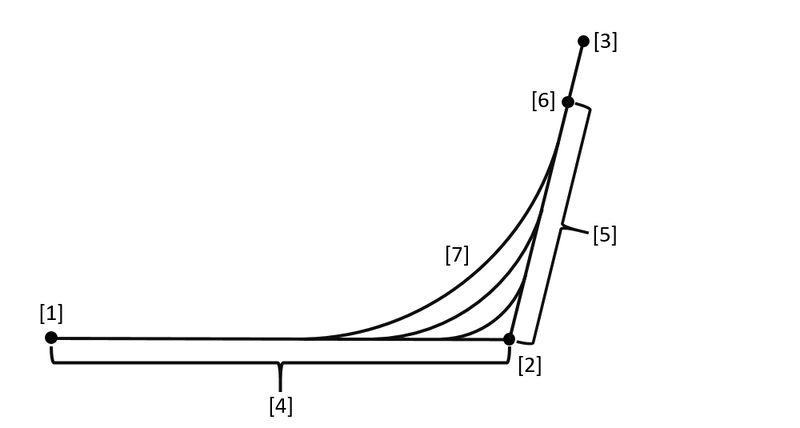
- Time offset using the Time parameter in [ms]: The value 0 does not result in a time shift. A negative value results in a time shift before reaching the shifted reference point, i.e. a lead time. A positive value results in a time shift after reaching the shifted reference point, i.e. a delay time.
- If time = 0: in the shifted reference point
- If time is negative: before reaching the shifted reference point
- If time is positive: after reaching the shifted reference point
INFORMATION

If several instructions are to be executed at the same point in the path progression, you can insert several path events with the same parameter setting into the SRL program.
The examples explained in the following chapters illustrate how the described parameters work.
Additional information