Kinematic models
The software module provides numerous kinematic models for configuring applications. These kinematic models are selected and configured using the Kinematic model configuration menu. In this chapter you will find more detailed information about the kinematic models and the parameters they contain.
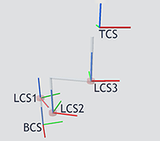
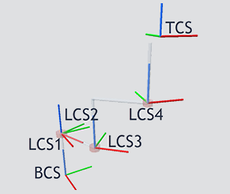
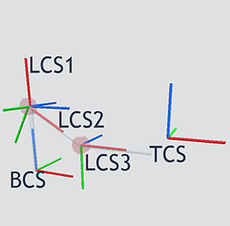
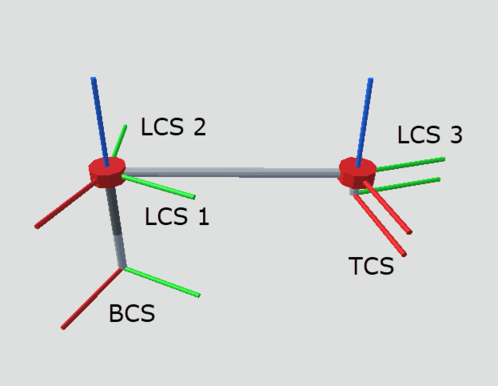
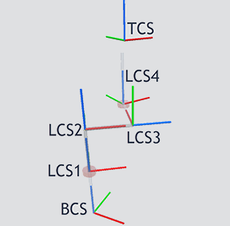
Information on the structure of the identifier of the kinematic models and on the Cartesian orientation of the coordinate systems can be found in the chapter Basic types.
INFORMATION

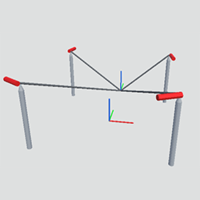
The selected kinematic model (displayed in the 3D simulation in RobotMonitor) must match the real robot. Otherwise, the kinematic control cannot be operated correctly. In addition, the real axes of the robot must be referenced according to the display in the 3D simulation and adjusted in the direction of rotation. You will find an instruction on how to do this further down in the chapter Referencing axes and performing function test.
Additional information
- Emergency stop ramps and software limit switches of the joints
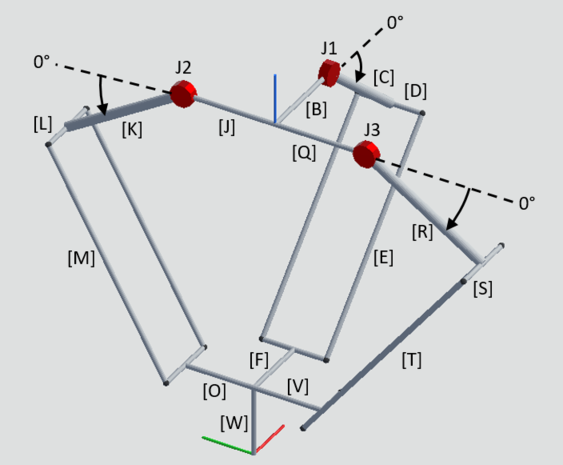
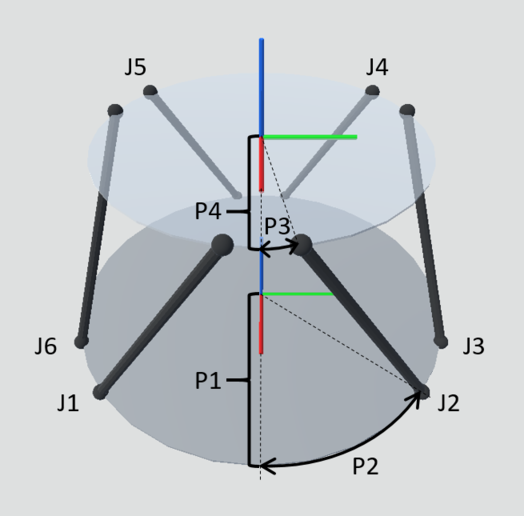
- Constellation and joint axis phases
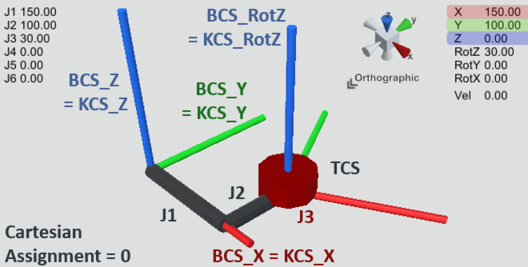
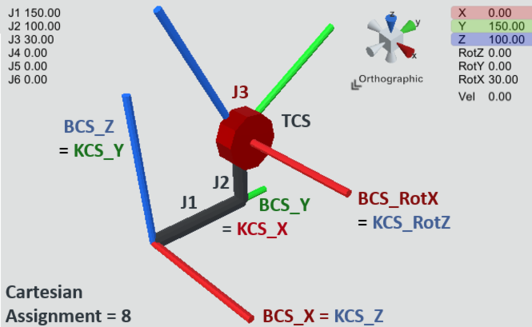
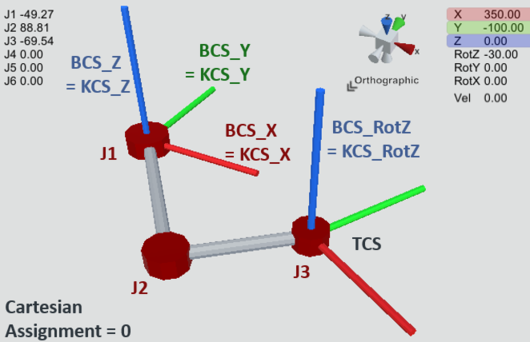
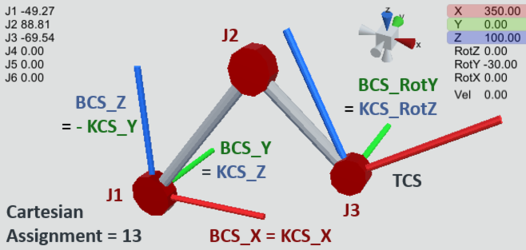
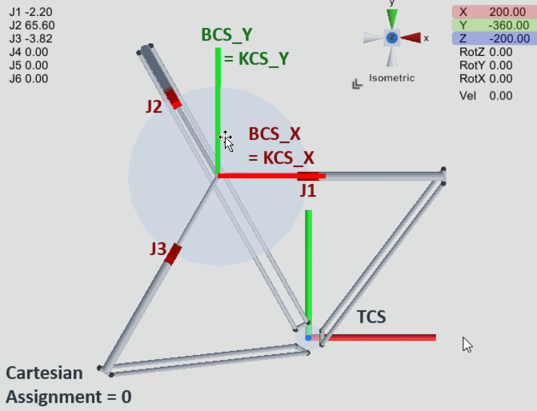
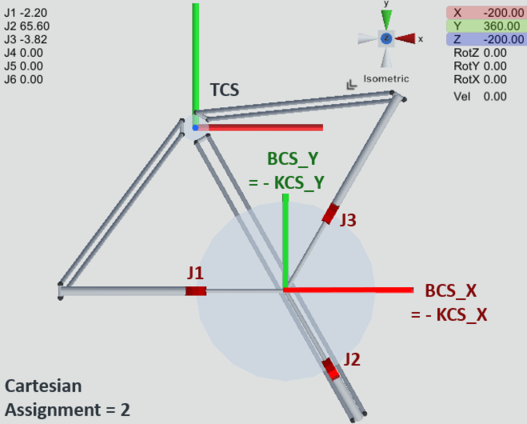
- Cartesian assignment
- LargeModels kinematic models
- CARTESIAN_GANTRY_LL_M10
- CARTESIAN_GANTRY_LLL_M10
- CARTESIAN_GANTRY_LLR_M10
- CARTESIAN_GANTRY_LLR_M20
- CARTESIAN_GANTRY_LLLR_M10
- CARTESIAN_GANTRY_LLLRR_M10
- ROLLER_GANTRY_RR_M10
- ROLLER_GANTRY_RRR_M10
- ROLLER_GANTRY_LRRR_M10
- ROLLER_GANTRY_RRLR_M10
- SCARA_RR_M10
- SCARA_RRR_M10
- SCARA_RRR_M20
- SCARA_LRRR_M10
- SCARA_RRRR_M10
- ARTICULATED_RRRRRR_M10
- DELTA_RR/RRR_M10, DELTA_RRRL_M20
- DELTA_RRL_M50
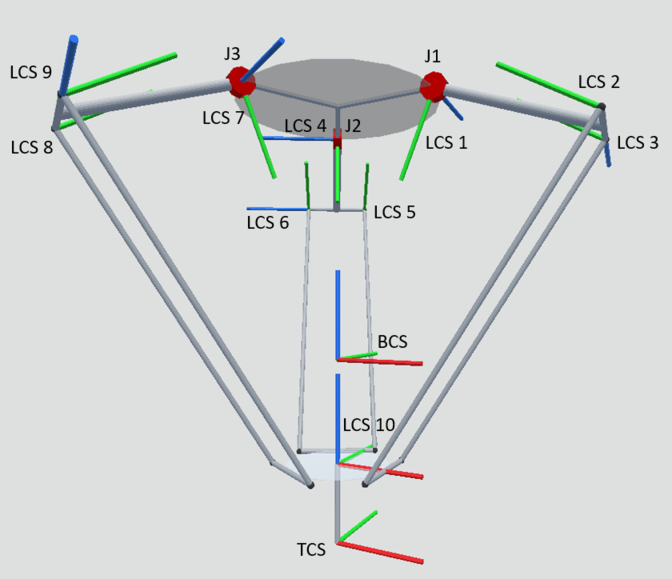
- TRIPOD_LLL/LLLR_M10
- TRIPOD_RRR/RRRR/RRRRR_M10
- TRIPOD_RRR/RRRR/RRRRR_M20
- QUADROPOD_LLLL_M20
- HEXAPOD_LLLLLL_M10
- MIXED_LR_M10
- MIXED_LRR_M10
- MIXED_LRR_M20
- MIXED_LRLR_M10
- MIXED_LRRL_M10
- MIXED_RLLR_M10