Kinematikmodelle
Das Softwaremodul stellt zahlreiche Kinematikmodelle zum Konfigurieren von Applikationen zur Verfügung. Das Auswählen und Konfigurieren dieser Kinematikmodelle erfolgt über das Konfigurationsmenü Kinematikmodell. In diesem Kapitel finden Sie detailliertere Informationen zu den Kinematikmodellen und den darin enthaltenen Parametern.
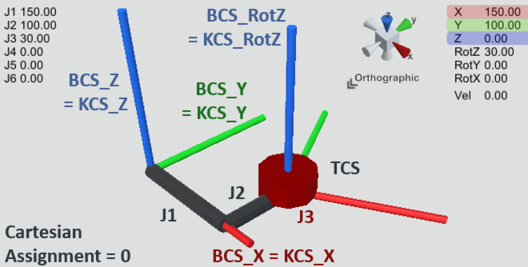
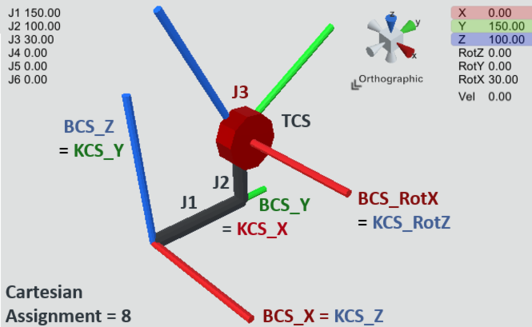
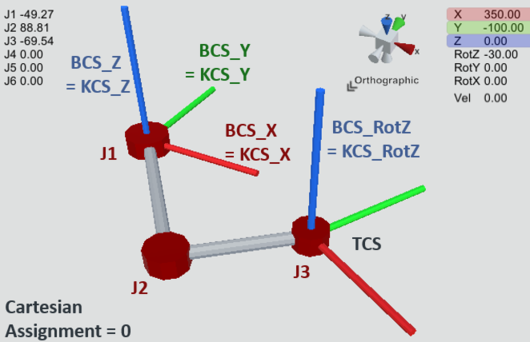
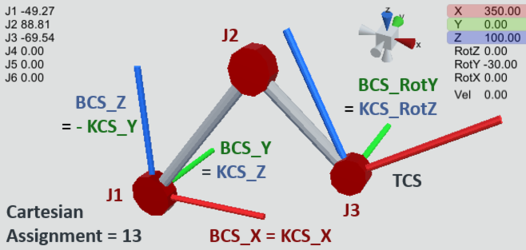
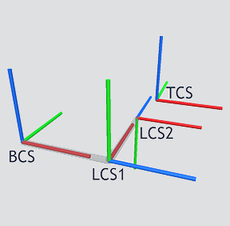
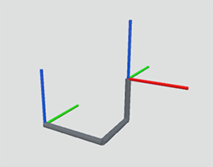
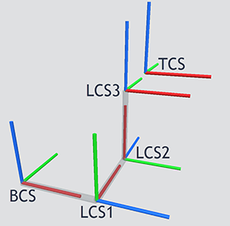
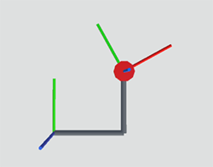
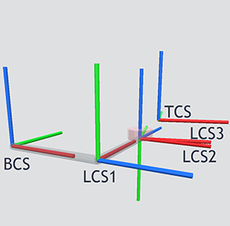
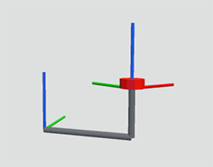
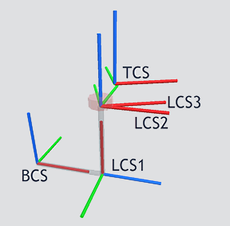
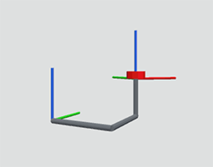
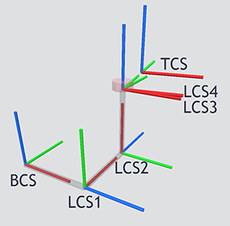
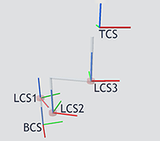
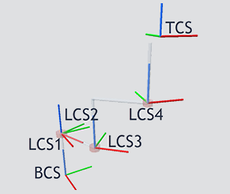
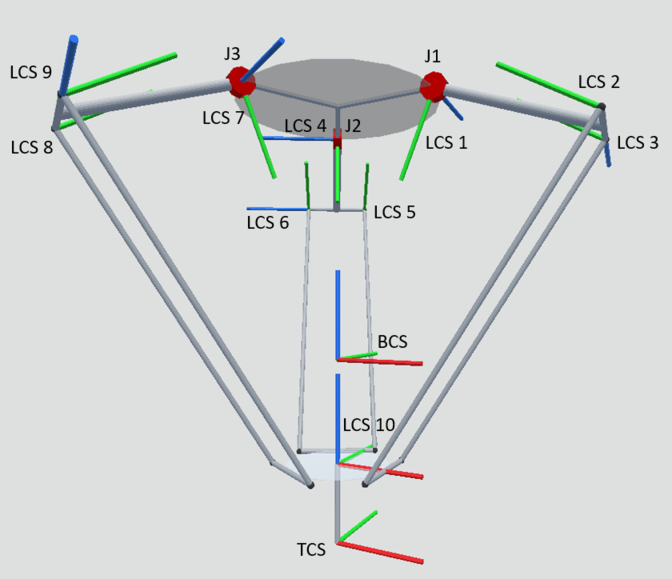
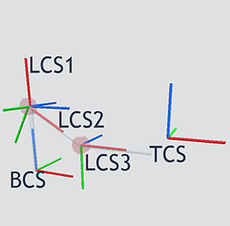
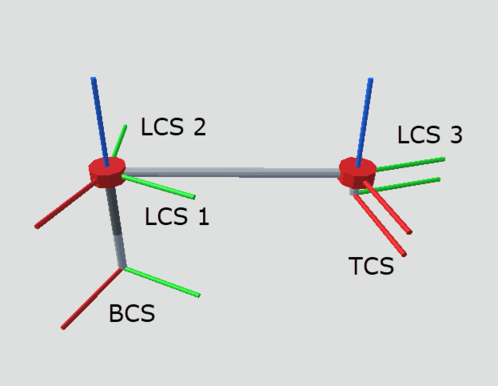
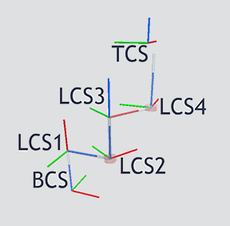
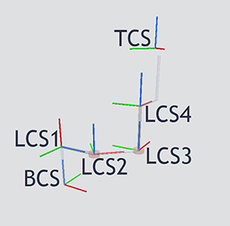
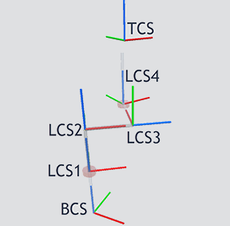
Informationen zum Aufbau des Bezeichners der Kinematikmodelle und zur kartesischen Ausrichtung der Koordinatensysteme finden Sie im Kapitel Grundlagen.
HINWEIS

Das ausgewählte Kinematikmodell (angezeigt in der 3D-Simulation im RobotMonitor) muss mit dem realen Roboter übereinstimmen. Andernfalls ist ein korrekter Betrieb der Kinematiksteuerung nicht möglich. Zudem müssen die realen Achsen des Roboters gemäß der Anzeige in der 3D-Simulation referenziert und in der Drehrichtung angepasst werden. Eine Anleitung hierzu folgt weiter unten im Kapitel Achsen referenzieren und Funktionstest durchführen.
Weiterführende Informationen
- Not-Halt-Rampen und Software-Endschalter der Gelenke
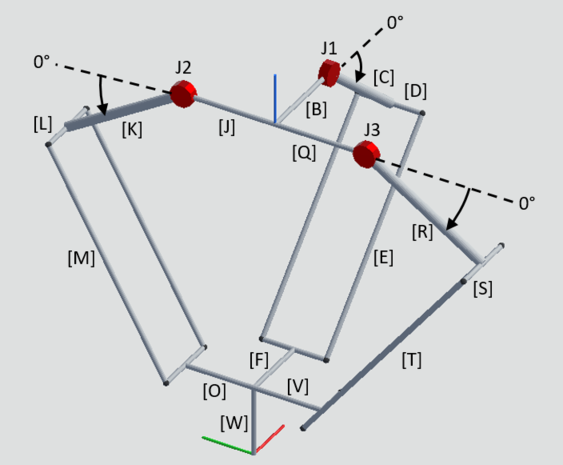
- Konstellation und Gelenkachsenphasen
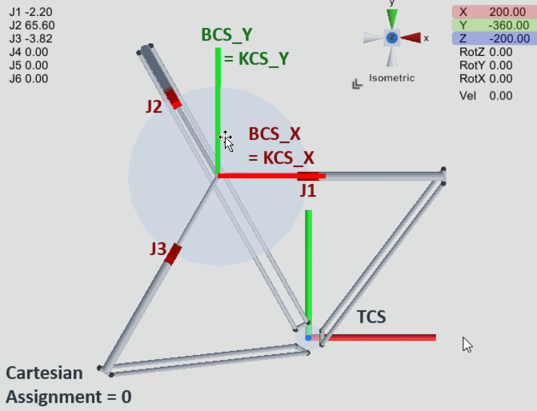
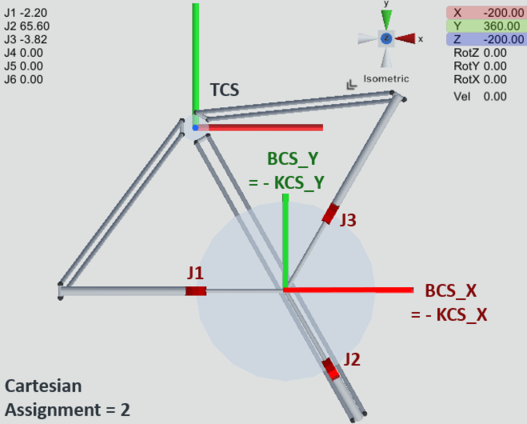
- Kartesische Zuordnung (Cartesian Assignment)
- LargeModels-Kinematikmodelle
- CARTESIAN_GANTRY_LL_M10
- CARTESIAN_GANTRY_LLL_M10
- CARTESIAN_GANTRY_LLR_M10
- CARTESIAN_GANTRY_LLR_M20
- CARTESIAN_GANTRY_LLLR_M10
- CARTESIAN_GANTRY_LLLRR_M10
- ROLLER_GANTRY_RR_M10
- ROLLER_GANTRY_RRR_M10
- ROLLER_GANTRY_LRRR_M10
- ROLLER_GANTRY_RRLR_M10
- SCARA_RR_M10
- SCARA_RRR_M10
- SCARA_RRR_M20
- SCARA_LRRR_M10
- SCARA_RRRR_M10
- ARTICULATED_RRRRRR_M10
- DELTA_RR/RRR_M10, DELTA_RRRL_M20
- DELTA_RRL_M50
- TRIPOD_LLL/LLLR_M10
- TRIPOD_RRR/RRRR/RRRRR_M10
- TRIPOD_RRR/RRRR/RRRRR_M20
- QUADROPOD_LLLL_M20
- HEXAPOD_LLLLLL_M10
- MIXED_LR_M10
- MIXED_LRR_M10
- MIXED_LRR_M20
- MIXED_LRLR_M10
- MIXED_LRRL_M10
- MIXED_RLLR_M10