QUADROPOD_LLLL_M20
Enthalten in der Lizenz MOVIKIT® Robotics addon MediumModels.
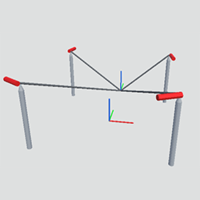
QUADROPOD mit 4 Linearachsen, gewöhnlich als Seile realisiert. Die Seilwinde befindet sich in der Nähe der Umlenkrolle, die den Nullpunkt der Linearachse darstellt.
- Gelenkachse 1: Seil von Umlenkrolle 1 zum Schnittpunkt
- Gelenkachse 2: Seil von Umlenkrolle 2 zum Schnittpunkt
- Gelenkachse 3: Seil von Umlenkrolle 3 zum Schnittpunkt
- Gelenkachse 4: Seil von Umlenkrolle 4 zum Schnittpunkt
HINWEIS: Der Roboter hat die 3 translatorischen Freiheitsgrade XYZ und ist somit überbestimmt.
Weiterführende Informationen
