QUADROPOD_LLLL_M20
Included in the MOVIKIT® Robotics add-on MediumModels license.
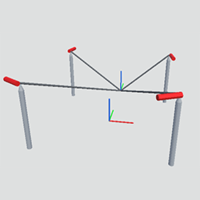
QUADROPOD with 4 linear axes, usually implemented as ropes. The winch is located near the pulley, which is the zero point of the linear axis.
- Joint axis 1: Rope from pulley 1 to point of intersection
- Joint axis 2: Rope from pulley 2 to point of intersection
- Joint axis 3: Rope from pulley 3 to point of intersection
- Joint axis 4: Rope from pulley 4 to point of intersection
INFORMATION: The robot has the 3 translational degrees of freedom XYZ and is therefore overdetermined.
Additional information
