Startup
This chapter describes the startup steps specific to the software module in more detail. For more detailed information and notes on the startup of all other devices and software components used in the project, refer to the corresponding documentation.
Additional information
- Startup procedure
- Creating a project
- Configuring the MOVI-C® CONTROLLER
- Configuring subordinate nodes
- Configuring the software module
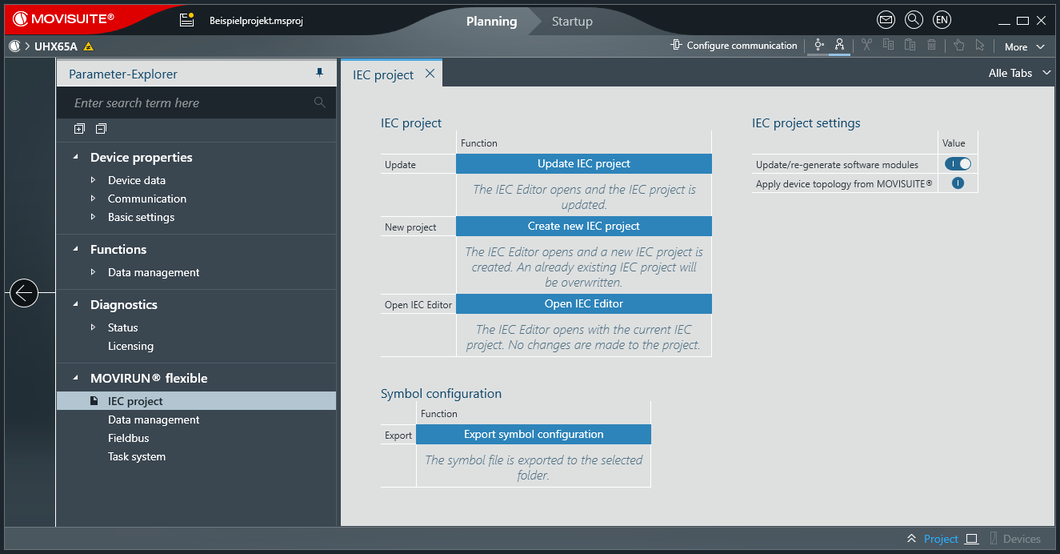
- Generating an IEC project
- Importing the MOVIKIT® fieldbus monitor
- Starting the control program
- Installing the RobotMonitor
- Starting the RobotMonitor
- Establishing a connection to the MOVI-C® CONTROLLER
- Managing users (optional)
- Setting sets of motion parameters
- Referencing axes and performing function test
- Programming the robot
- Integrating the robot