Inbetriebnahme
In diesem Kapitel sind die für das Softwaremodul spezifischen Inbetriebnahmeschritte näher erläutert. Detailliertere Informationen und Hinweise zur Inbetriebnahme aller weiteren im Projekt verwendeten Geräte und Softwarekomponenten finden Sie in den jeweils dazugehörigen Dokumentationen.
Weiterführende Informationen
- Inbetriebnahmeablauf
- Projekt anlegen
- MOVI-C® CONTROLLER konfigurieren
- Untergeordnete Knoten konfigurieren
- Softwaremodul konfigurieren
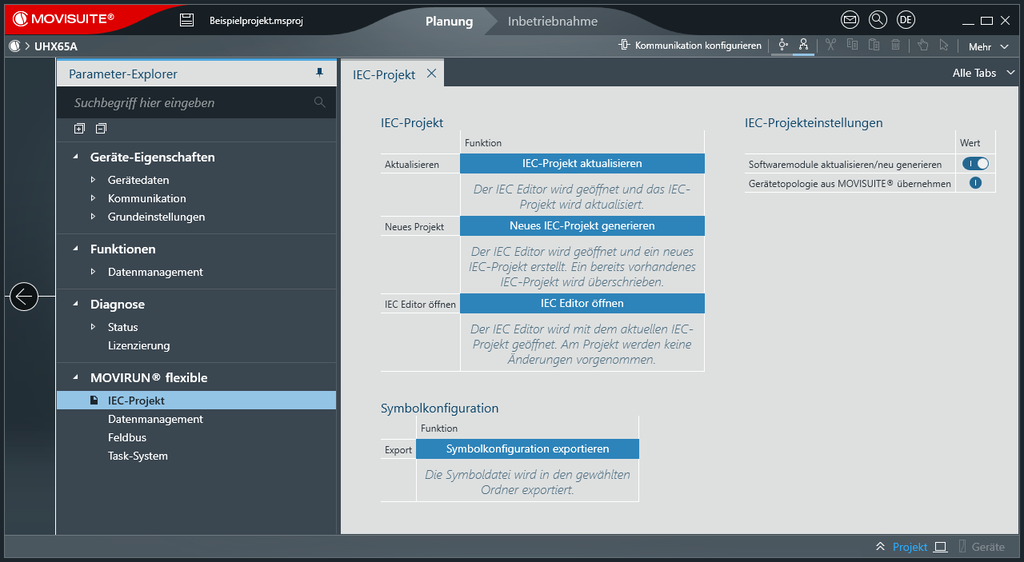
- IEC-Projekt generieren
- MOVIKIT® Feldbusmonitor importieren
- Steuerungsprogramm starten
- RobotMonitor installieren
- RobotMonitor starten
- Verbindung zum MOVI-C® CONTROLLER aufbauen
- Benutzer verwalten (optional)
- Bewegungsparametersätze einstellen
- Achsen referenzieren und Funktionstest durchführen
- Roboter programmieren
- Roboter integrieren