DELTA_RR/RRR_M10, DELTA_RRRL_M20
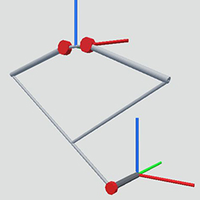
DELTA_RR_M10
Enthalten in der Lizenz MOVIKIT® Robotics.
DELTA mit 2 Drehachsen:
- Gelenkachsen 1 und 2: Ermöglichen zusammen die translatorische Bewegung des Werkzeugs in der ZX-Ebene. Die Bewegung einer Gelenkachse ist nicht eindeutig der Bewegung einer kartesischen Achse zuzuordnen.
HINWEIS: Die Flanschorientierung wird mit einem Parallelogramm oder Riemen konstant gehalten oder das Werkzeug besteht nur z. B. aus einem Stift, dessen Orientierung keine Rolle spielt.
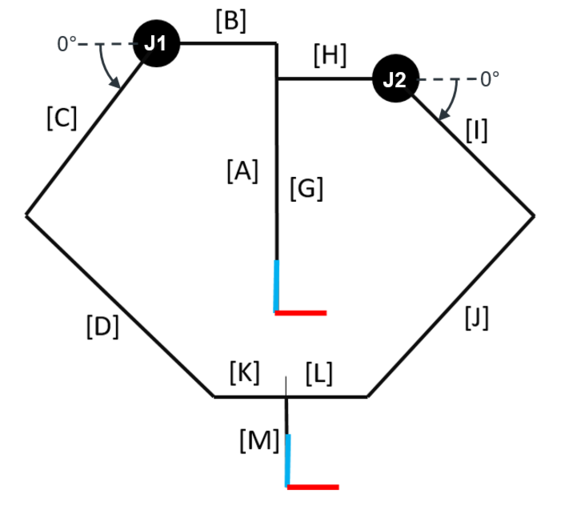
DELTA_RRR_M10
Enthalten in der Lizenz MOVIKIT® Robotics addon MediumModels.
DELTA mit 3 Drehachsen:
- Gelenkachsen 1 und 2: Ermöglichen zusammen die translatorische Bewegung des Werkzeugs in der ZX-Ebene. Die Bewegung einer Gelenkachse ist nicht eindeutig der Bewegung einer kartesischen Achse zuzuordnen.
- Gelenkachse 3: Dreht das Werkzeug um die Handgelenksachse (parallel zur Z-Achse).
HINWEIS: Die Orientierung der Verankerung von Gelenkachse 3 wird mit einem Parallelogramm oder Riemen konstant gehalten.
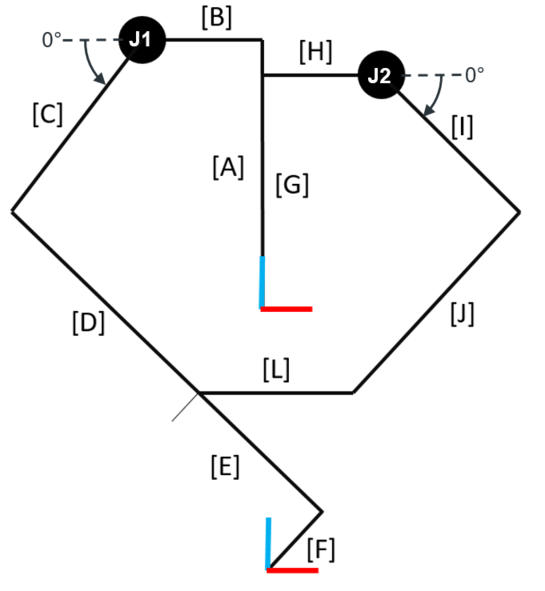
DELTA_RRRL_M20
Enthalten in der Lizenz MOVIKIT® Robotics addon MediumModels.
DELTA mit 3 Dreh- und 1 Linearachse:
- Gelenkachsen 1 und 2: Ermöglichen zusammen die translatorische Bewegung des Werkzeugs in der ZX-Ebene. Die Bewegung einer Gelenkachse ist nicht eindeutig der Bewegung einer kartesischen Achse zuzuordnen.
- Gelenkachse 3: Dreht das Werkzeug um die Handgelenksachse (parallel zur Y-Achse).
- Gelenkachse 4: Verschiebt das Werkzeug parallel zur Y-Achse.
HINWEIS: Wenn die Parameter (E) und (F) beide gleich 0 sind, wird die Orientierung der Verankerung von Gelenkachse 3 mit einem Parallelogramm oder Riemen konstant gehalten. Ansonsten ist Gelenkachse 3 an der Verlängerung (E) bzw. dem Versatz (F) des Oberarms (D) angebracht und die X-Achse des Flanschkoordinatensystems zeigt in Nullstellung von Gelenkachse 3 in Richtung der Verlängerung von Oberarm (D).