Kartesische Zuordnung (Cartesian Assignment)
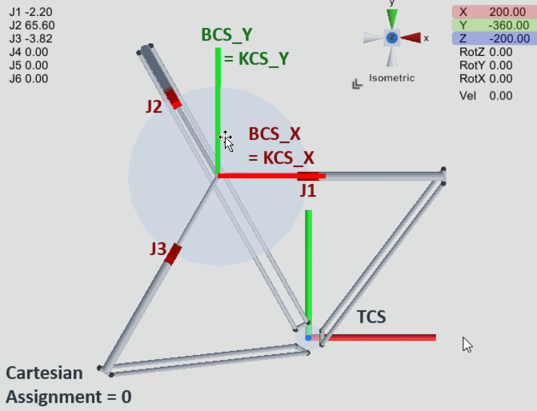
Ein Kinematikmodell hat eine bestimmte Anordnung von Nullpunkt und Drehrichtung der Gelenkachsen in Bezug auf das Kinematik-Koordinatensystem KCS (Kinematic Coordinate System). In der Standard-Einstellung (kartesische Zuordnung 0) ist das Kinematik-Koordinatensystem KCS identisch mit dem BASE-Koordinatensystem BCS (Base Coordinate System).
Die Bahnprogrammierung in KCS-Koordinaten wird nicht unterstützt. Das Kinematik-Koordinatensystem KCS dient lediglich der im Folgenden beschriebenen Transformation zur Flexibilisierung der zur Verfügung stehenden Kinematikmodelle hinsichtlich der kartesischen Koordinaten.
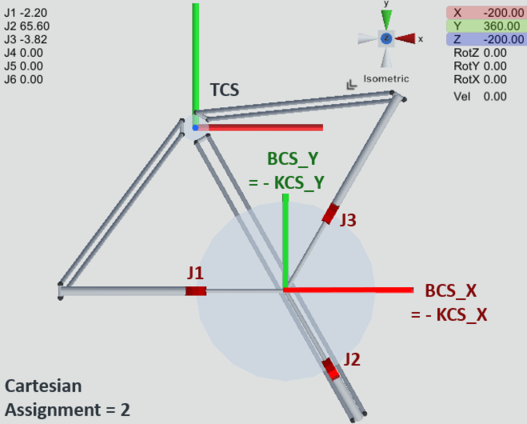
Das Kinematikmodell kann mit dem Kinematik-Koordinatensystem KCS relativ zum BASE-Koordinatensystem BCS um 90°-Vielfache gekippt werden. Je nach Kinematikmodell gibt es hierzu ausgehend von der Standard-Einstellung 0 bis zu 23 Möglichkeiten. In der folgenden Tabelle wird zu jeder kartesischen Zuordnung angegeben, wie das BASE-Koordinatensystem BCS relativ zum Kinematik-Koordinatensystem KCS ausgerichtet ist bzw. aus der inversen Sichtweise, wie das Kinematik-Koordinatensystem KCS relativ zum BASE-Koordinatensystem BCS ausgerichtet ist.
Unabhängig von der eingestellten kartesischen Zuordnung (Cartesian Assignment) müssen die Antriebe in aufsteigender Reihenfolge der Gelenkachsen des ausgewählten Kinematikmodells in MOVISUITE® von links nach rechts an den Softwareknoten des Softwaremoduls angehängt werden. Die Reihenfolge der Gelenkachsen des ausgewählten Kinematikmodells ist in den folgenden Kapiteln angegeben und ist unabhängig von der eingestellten kartesischen Zuordnung. Auch wenn beispielsweise die Gelenkachse 2 durch den Anwender mit "X-Achse" bezeichnet wird und die Gelenkachse 1 mit "Y-Achse", muss Gelenkachse 2 rechts neben Gelenkachse 1 an den Softwareknoten angehängt werden.
Die Einstellung erfolgt im Konfigurationsmenü des Kinematikmodells und ist mit MOVISUITE®-Berechtigungsstufe "Advanced" (Passwort: 1108) möglich.
Kartesische Zuordnung | Ausrichtung des BASE-Koordinatensystems relativ zum Kinematik-Koordinatensystem | Ausrichtung des Kinematik-Koordinatensystems relativ zum BASE-Koordinatensystem | ||||
|---|---|---|---|---|---|---|
BCS_X | BCS_Y | BCS_Z | KCS_X | KCS_Y | KCS_Z | |
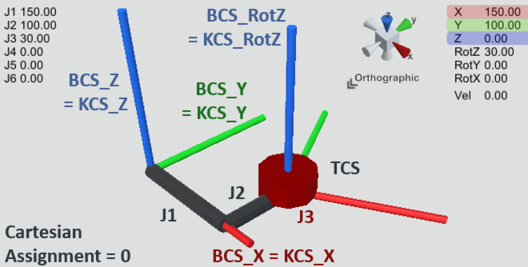
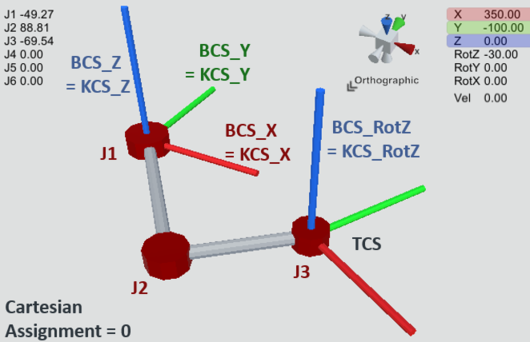
0 | KCS_X | KCS_Y | KCS_Z | BCS_X | BCS_Y | BCS_Z |
1 | - KCS_Y | KCS_X | KCS_Z | BCS_Y | - BCS_X | BCS_Z |
2 | - KCS_X | - KCS_Y | KCS_Z | - BCS_X | - BCS_Y | BCS_Z |
3 | KCS_Y | - KCS_X | KCS_Z | - BCS_Y | BCS_X | BCS_Z |
4 | KCS_X | - KCS_Y | - KCS_Z | BCS_X | - BCS_Y | - BCS_Z |
5 | - KCS_Y | - KCS_X | - KCS_Z | - BCS_Y | - BCS_X | - BCS_Z |
6 | - KCS_X | KCS_Y | - KCS_Z | - BCS_X | BCS_Y | - BCS_Z |
7 | KCS_Y | KCS_X | - KCS_Z | BCS_Y | BCS_X | - BCS_Z |
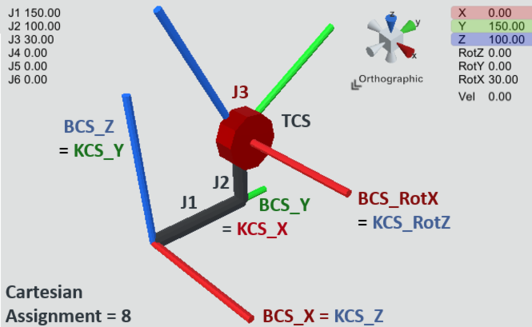
8 | KCS_Z | KCS_X | KCS_Y | BCS_Y | BCS_Z | BCS_X |
9 | KCS_Z | - KCS_Y | KCS_X | BCS_Z | - BCS_Y | BCS_X |
10 | KCS_Z | - KCS_X | - KCS_Y | - BCS_Y | - BCS_Z | BCS_X |
11 | KCS_Z | KCS_Y | KCS_X | - BCS_Z | BCS_Y | BCS_X |
12 | KCS_Y | KCS_Z | KCS_X | BCS_Z | BCS_X | BCS_Y |
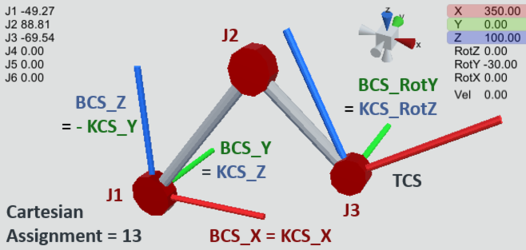
13 | KCS_X | KCS_Z | - KCS_Y | BCS_X | - BCS_Z | BCS_Y |
14 | - KCS_Y | KCS_Z | - KCS_X | - BCS_Z | - BCS_X | BCS_Y |
15 | - KCS_X | KCS_Z | KCS_Y | - BCS_X | BCS_Z | BCS_Y |
16 | - KCS_Z | KCS_Y | KCS_X | BCS_Z | BCS_Y | - BCS_X |
17 | - KCS_Z | KCS_X | - KCS_Y | BCS_Y | - BCS_Z | - BCS_X |
18 | - KCS_Z | - KCS_Y | - KCS_X | - BCS_Z | - BCS_Y | - BCS_X |
19 | - KCS_Z | - KCS_X | KCS_Y | - BCS_Y | BCS_Z | - BCS_X |
20 | KCS_X | - KCS_Z | KCS_Y | BCS_X | BCS_Z | - BCS_Y |
21 | - KCS_Y | - KCS_Z | KCS_X | BCS_Z | - BCS_X | - BCS_Y |
22 | - KCS_X | - KCS_Z | - KCS_Y | - BCS_X | - BCS_Z | - BCS_Y |
23 | KCS_Y | - KCS_Z | - KCS_X | - BCS_Z | - BCS_X | - BCS_Y |