Beispiele
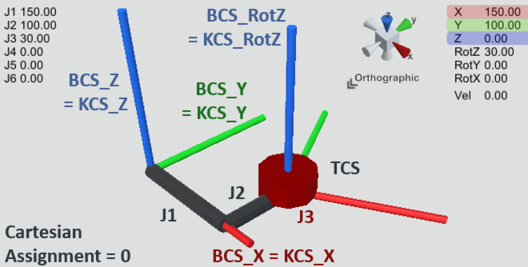
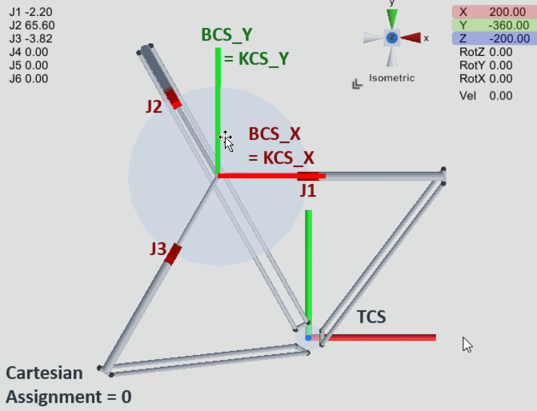
Beispiel 1: CARTESIAN_GANTRY_LLR_M10
Das Kinematikmodell CARTESIAN_GANTRY_LLR_M10 hat in der Standard-Einstellung (kartesische Zuordnung 0) die kartesischen Freiheitsgrade X, Y und RotZ im BASE-Koordinatensystem BCS. Dabei bewegt sich die Gelenkachse 1 entlang BCS_X und die Gelenkachse 2 entlang BCS_Y. Gelenkachse 3 dreht sich um BCS_Z. Siehe CARTESIAN_GANTRY_LLR_M10. Da KCS und BCS in dieser Zuordnung identisch sind, zeigen die Gelenkachsen in die entsprechenden Richtungen des KCS.
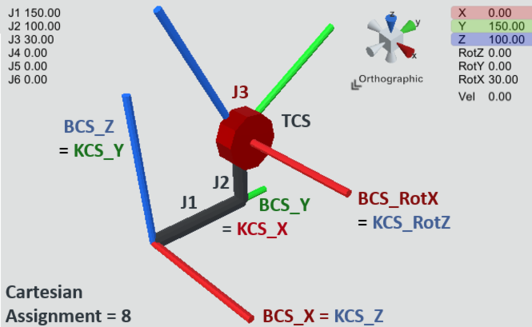
Wenn sich nun stattdessen z. B. die Gelenkachse 1 entlang BCS_Y und die Gelenkachse 2 entlang BCS_Z bewegen soll, sowie die Gelenkachse 3 um BCS_X, ist wie folgt vorzugehen:
Das Kinematikmodell wird mit dem Kinematik-Koordinatensystem KCS relativ zum BASE-Koordinatensystem BCS ausgerichtet. Da Gelenkachse 1 der KCS_X-Richtung entspricht und diese in Richtung BCS_Y zeigen soll, muss daher KCS_X in Richtung BCS_Y zeigen. Gelenkachse 2 entspricht der KCS_Y-Richtung und diese soll in Richtung BCS_Z zeigen. Da die verwendeten Koordinatensysteme rechtshändig sind, muss KCS_Z in Richtung BCS_X zeigen. Mit KCS_X = BCS_Y und KCS_Y = BCS_Z wählt man nun die Zeile in der obigen Tabelle aus, in der dies erfüllt ist (mittels Spalten 2-4 oder 5-7). Dies ist die kartesische Zuordnung 8.
Kartesische Zuordnung | Ausrichtung des BASE-Koordinatensystems relativ zum Kinematik-Koordinatensystem | Ausrichtung des Kinematik-Koordinatensystems relativ zum BASE-Koordinatensystem | ||||
|---|---|---|---|---|---|---|
BCS_X | BCS_Y | BCS_Z | KCS_X | KCS_Y | KCS_Z | |
8 | KCS_Z | KCS_X | KCS_Y | BCS_Y | BCS_Z | BCS_X |
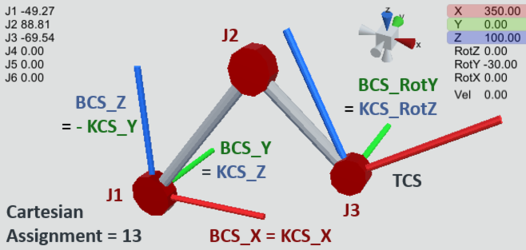
Beispiel 2: SCARA_RRR_M20
Das Kinematikmodell SCARA_RRR_M20 hat in der Standard-Einstellung (kartesische Zuordnung 0) die kartesischen Freiheitsgrade X, Y und RotZ im BASE-Koordinatensystem BCS mit Drehung der 3 Gelenkachsen um BCS_Z. Da KCS und BCS in dieser Zuordnung identisch sind, drehen die Gelenkachsen entsprechend um KCS_Z. Siehe SCARA_RRR_M20.
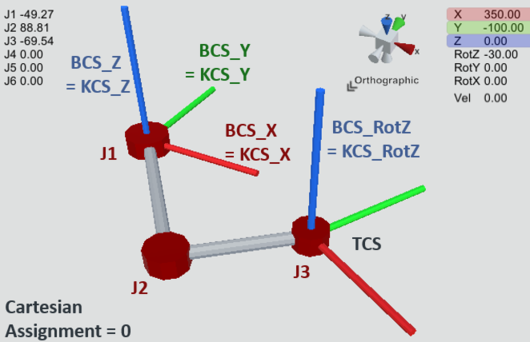
Wenn sich nun stattdessen z. B. die Gelenkachsen um BCS_Y drehen sollen, ist wie folgt vorzugehen:
Das Kinematikmodell wird mit dem Kinematik-Koordinatensystem KCS relativ zum BASE-Koordinatensystem BCS ausgerichtet. Da die 3 Gelenkachsen um Richtung der KCS_Z drehen und diese nun um die BCY_Y-Richtung drehen sollen, muss daher KCS_Z in Richtung BCS_Y zeigen. Die X-Achse soll in diesem Fall unverändert bleiben. Mit KCS_Z = BCS_Y und KCS_X = BCS_X wählt man nun die Zeile in der obigen Tabelle aus (mittels Spalten 2-4 oder 5-7), in der dies erfüllt ist. Dies ist die kartesische Zuordnung 13.
Kartesische Zuordnung | Ausrichtung des BASE-Koordinatensystems relativ zum Kinematik-Koordinatensystem | Ausrichtung des Kinematik-Koordinatensystems relativ zum BASE-Koordinatensystem | ||||
|---|---|---|---|---|---|---|
BCS_X | BCS_Y | BCS_Z | KCS_X | KCS_Y | KCS_Z | |
13 | KCS_X | KCS_Z | - KCS_Y | BCS_X | - BCS_Z | BCS_Y |
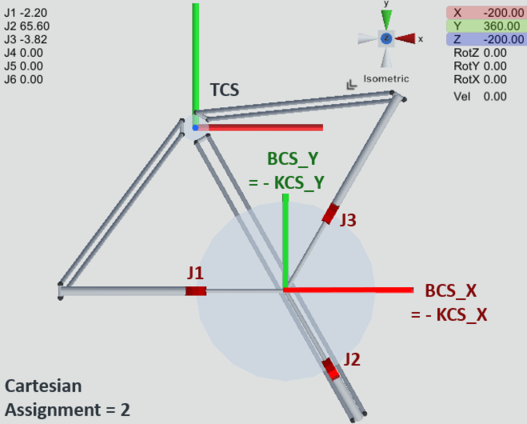
Beispiel 3: TRIPOD_RRR_M10
Das Kinematikmodell TRIPOD_RRR_M10 hat in der Standard-Einstellung (kartesische Zuordnung 0) die kartesischen Freiheitsgrade X, Y und Z im BASE-Koordinatensystem BCS, wobei die Gelenkachsen in der Draufsicht im Versatz von 120° gegen den Uhrzeigersinn angeordnet sind mit Gelenkachse 1 auf der kartesischen Achse BCS_X. Da KCS und BCS in dieser Zuordnung identisch sind, zeigen die Gelenkachsen in die entsprechenden Richtungen des KCS. Siehe TRIPOD_RRR/RRRR/RRRRR_M10.
Wenn nun stattdessen z. B. die kartesische Achse BCS_X zwischen den Gelenkachsen 2 und 3 verlaufen soll, ist wie folgt vorzugehen:
Das Kinematikmodell wird mit dem Kinematik-Koordinatensystem KCS wie gewünscht relativ zum BASE-Koordinatensystem BCS ausgerichtet. In diesem Beispiel zeigt KCS_X (also die Richtung, auf der Gelenkachse 1 angeordnet ist) in Richtung -BCS_X und KCS_Y in Richtung -BCS_Y. KCS_Z zeigt unverändert in Richtung BCS_Z.
Mit KCS_X = -BCS_X und KCS_Z = BCS_Z wählt man nun die Zeile in der obigen Tabelle aus, in der dies erfüllt ist (mittels Spalten 2-4 oder 5-7). Dies ist die kartesische Zuordnung 2.
Kartesische Zuordnung | Ausrichtung des BASE-Koordinatensystems relativ zum Kinematik-Koordinatensystem | Ausrichtung des Kinematik-Koordinatensystems relativ zum BASE-Koordinatensystem | ||||
|---|---|---|---|---|---|---|
BCS_X | BCS_Y | BCS_Z | KCS_X | KCS_Y | KCS_Z | |
2 | - KCS_X | - KCS_Y | KCS_Z | - BCS_X | - BCS_Y | BCS_Z |