MIXED_LR_M10
Enthalten in der Lizenz MOVIKIT® Robotics.
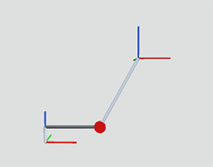
Ein MIXED-Kinematikmodell mit 1 Linearachse und 1 Drehachse
- Gelenkachse 1: X-Richtung
- Gelenkachse 2: Drehung um Achse parallel zur Y-Achse.
HINWEIS: Die Flanschorientierung wird mit einem Parallelogramm oder Riemen konstant gehalten. Oder das Werkzeug besteht nur z. B. aus einem Stift, dessen Orientierung keine Rolle spielt.
Weiterführende Informationen
