Example 3
Path event with reference point at the end point of the segment, shifted forwards in path progression by a negative value of the Distance parameter and with different values of the Time parameter.
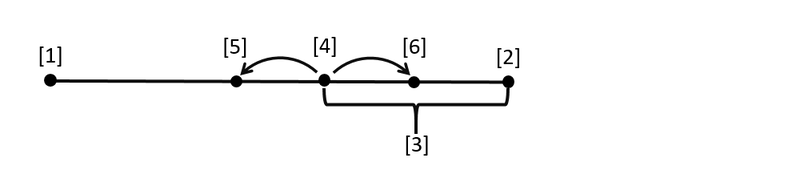
[1] | Starting point of the path segment |
[2] | End point of the path segment |
[3] | Distance in [mm], negative value |
[4] | Point at which the path event is triggered if Time = 0 |
[5] | Point at which the path event is triggered if Time < 0 |
[6] | Point at which the path event is triggered if Time > 0 |
The reference point and the time can be shifted across several path segments.
The shifts in the forward path progression take place up to a maximum of one stop point. Stop points are the starting point of the path and the starting points of path segments to which no blending is performed.
If the reference point shifted by the Distance parameter is located before the last stop point, error message 16#7E82 "PathEventPositionBeforePathBegin" will be issued.
If the parameterized lead time (negative value in the Time parameter) is longer than the time for moving to the shifted reference point (using the Distance parameter), the following behavior occurs:
- When the robot (in the current coordinate system) is at a standstill, the path event is triggered and the lead time starts to expire. The robot starts the movement only when it is at the shifted reference point after the parameterized lead time has expired. During the waiting period, a corresponding message is displayed in the RobotMonitor.
- When the robot (in the current coordinate system) is in motion and the (moved) reference point is at the path end, the path event is triggered and the lead time begins to expire. The robot continues moving up to the path end and waits there until the parameterized time expires. A corresponding message is displayed in RobotMonitor.
- When the robot (in the current coordinate system) is in motion and the moved reference point is not at the path end, error message 16#7E83 "PathEventTimeShiftExceedsRemainingTimeIn-Motion" is issued. In this case, the path event is not triggered.
The shifts in the path progression to the rear also take place across stop points, but at most up to a command that expects the end of the movement: "WAIT MotionDone" or "END_PROG WaitMotion".
