Example 6
Reference points within blending range
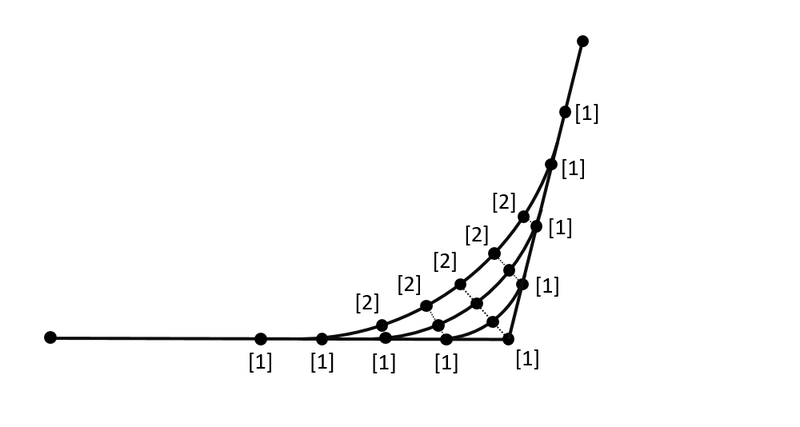
[1] | Reference points on the path shifted using the Distance parameter without blending at which the respective path event is triggered |
[2] | Reference points shifted on the blending curves |
The number of path events in an SRL program is not limited. The maximum number of path events in the program is 64. If 64 path events are registered in the SRL program, the program pointer will not advance until previously registered path events have been triggered and are no longer active. This situation is displayed in the RobotMonitor with an appropriate message.
The SRL program does not end until all registered path events have been triggered. This means that if the shifted reference point is behind the end point of the last interpreted path segment or if a lead time has not yet expired, the SRL program will not end. In these cases, the RobotMonitor will display a corresponding message.
If the SRL program is paused and/or the robot is moved away from the path in jog mode, path events are still triggered at the end of an already started lead time. This situation is indicated by warning 16#17E82 "PathEventTime-ShiftElapsedNotInProgramMode" in the RobotMonitor.
When starting and stopping an SRL program, all previously registered path events are deleted.
The path events refer to the setpoint path progression. Accordingly, a lag error can lead to inaccuracies when triggering path events. Increased cycle times of the HighPrio task also lead to reduced accuracy because the path events are triggered in the HighPrio task.
