Open loop
Open Loop | profilo di posizione PtP | |
|---|---|
Modo operativo: 1: profilo di posizione PtP | |
Open loop
| |
Specifica della posizione nominale | |
La visualizzazione dipende dall'impostazione in 0x8F00-01 - configurazione retroazione dell'encoder | |
L'open loop ha le caratteristiche seguenti:
- Il modulo funzionale lavora nella modalità controllata.
- Il segnale encoder non è contemplato dalla regolazione.
- Il riferimento per il regolatore di corrente viene generato dal generatore profilo sovraordinato.
- La posizione reale corrisponde al valore posizione del generatore profilo.
- A seconda dell'impostazione in "0x8F00-01 - configurazione retroazione encoder" viene emesso un valore encoder.
Struttura
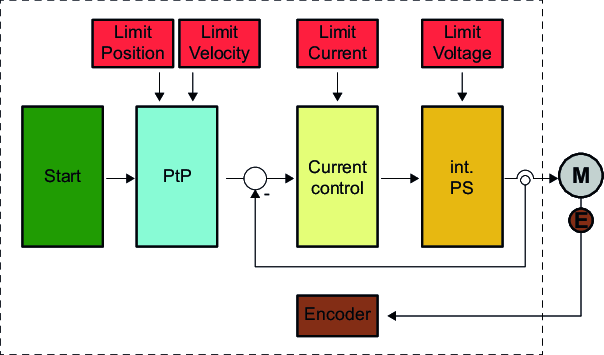
Start | Parametri di avvio |
Limit Position | Limite di posizione |
Limit Voltage | Limitazione di tensione |
Position control | Controllore posizione |
PI control | Regolatore di corrente PI |
M | motore |
Limit Velocity | Limite di velocità |
Limit Current | Limitazione di corrente |
PtP | Profilo di posizione PtP |
Velocity control | Regolatore di velocità |
int. PS | Stadio finale di potenza interno (power stage) |
Encoder | Valore reale encoder |
Start - parametri profilo di posizione PtP
NOTA

0x8280-01 - modo operativo nominale 1: profilo di posizione PtP |
→ |
Start |
→ |
Generatore profilo di posizione PtP
|
0x8400-04 - profilo di posizione accelerazione di destinazione | ||||
0x8400-05 - profilo di posizione decelerazione di destinazione | ||||
0x8F00-01 - configurazione retroazione dell'encoder 0: open loop (senza valore reale encoder) 1: open loop (con valore reale encoder) |
Limit Position - limite di posizione
|
→
|
Limit Position
|
→
|
Generatore profilo di posizione PtP
| |
Limit - limite di velocità
|
→
|
Limit Velocity
|
→
|
Generatore profilo di posizione PtP
| |
PtP – profilo di posizione
Limit Position Limite di posizione |
→
|
PtP
|
→
|
Current control Regolatore di corrente
Valore encoder
0x8480-03 - posizione nominale 0x8480-10 - errore di inseguimento
|
Limit Velocity Limite di velocità | ||||
Start | ||||
0x8400-04 - profilo di posizione accelerazione di destinazione | ||||
0x8400-05 - profilo di posizione decelerazione di destinazione | ||||
Limit Current – limitazione di corrente
|
→
|
Limit Current
|
→
|
Current control Regolatore di corrente
| |
Current control – regolatore di corrente
Limit Current Limitazione di corrente |
→ |
Current control |
→ |
int. PS Stadio finale di potenza interno (power stage)
0X8600-02 - corrente - valore reale 0x8600-10 - corrente - valore reale avvolgimento A 0x8600-11 - valore reale della corrente avvolgimento B
|
Generatore profilo di posizione PtP | ||||
Limit Voltage – limitazione di tensione
int. PS – stadio finale di potenza, motore, encoder
Limit Voltage Limitazione di tensione |
→
|
int. PS
|
→
| Motore Encoder 0x8F00-02 - encoder - valore reale
0x8680-02 - alimentazione di potenza - valore reale tensione |
Current control Regolatore di corrente |
