Bucle cerrado
Bucle cerrado | Perfil de posicionamiento PtP | |
|---|---|
Modo de funcionamiento: 1: Perfil de posicionamiento PtP | |
Bucle cerrado Bucle cerrado - Control de campo orientado (FOC)
| |
Especificación de la posición de consigna | |
Valor de encoder normalizado a posición | |
Valor de encoder | |
El bucle cerrado tiene las siguientes características:
- El módulo de función opera en funcionamiento controlado mediante una estructura de regulación en cascada.
- La señal del encoder se incluye en el control.
- La consigna para el regulador de corriente la genera el lazo de regulación de nivel superior.
- La posición real se corresponde con el valor de encoder normalizado a posición.
- Se emite un valor de encoder. Encontrará más información en el capítulo Bucle cerrado - Control de campo orientado (FOC).
Estructura
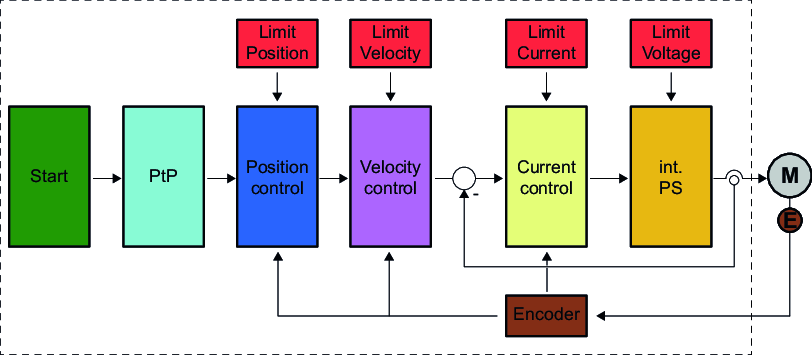
Start | Parámetro de inicio |
Limit Position | Limitación de posicionamiento |
Limit Voltage | Limitación de tensión |
Position control | Regulador de posición |
Current control | Regulador de corriente |
PI control | Regulador de corriente PI |
M | Motor |
Limit Velocity | Limitación de velocidad |
Limit Current | Limitación de corriente |
PtP | Perfil de posicionamiento PtP |
Velocity control | Regulador de velocidad |
int. PS | Etapa de salida de potencia interna (power stage) |
Encoder | Valor real de encoder |
Start - parámetro perfil de posicionamiento PtP
AVISO

0x8280-01 - Modo de funcionamiento de consigna 1: Perfil de posicionamiento PtP |
→ |
Start
|
→
|
PtP Perfil de posicionamiento Generador
|
0x8400-05 - Perfil de posicionamiento deceleración de destino | ||||
0x8F00-01 - Configuración realimentación del encoder 3: Bucle cerrado |
PtP – Perfil de posicionamiento
Start |
→ |
PtP |
→ | Position control Regulador de posición |
0x8400-05 - Perfil de posicionamiento deceleración de destino | ||||
Limit Position – limitación de posicionamiento
|
→
|
Limit Position
|
→
|
PtP Perfil de posicionamiento Generador
| |
Position control – Regulador de posición
Limit Position Limitación de posicionamiento |
→
|
Position Control
|
→
|
Velocity control Regulador de velocidad
|
|
Valor de encoder | ||||
PtP Perfil de posicionamiento Generador | ||||
Vel – perfil de velocidad
Position control Regulador de posición
|
→
|
Velocity
|
→
|
Velocity control Regulación de velocidad
|
Limit – limitación de velocidad
|
→
|
Limit Velocity
|
→
|
Velocity control Regulador de velocidad
| |
Vel control - regulador de velocidad
Limit Velocity Limitación de velocidad |
→
|
Velocity control
|
→
|
Current control Regulador de corriente
0x8480-03 - Posición de consigna 0x8480-10 - Error de seguimiento
|
|
Valor de encoder | ||||
PtP Perfil de posicionamiento Generador | ||||
0x8F00-01 - Configuración realimentación del encoder
|
Limit Current – limitación de corriente
|
→
|
Limit Current
|
→
|
Current control Regulador de corriente
| |
Current control – regulador de corriente
Limit Current Limitación de corriente |
→ |
Current control |
→ |
int. PS Etapa de salida de potencia interna (power stage)
0x8600-02 - Corriente - Valor real 0x8600-10 - Valor real corriente devanado A 0x8600-11 - Valor real corriente devanado B 0x8600-12 - Corriente - Consigna devanado A 0x8600-13 - Corriente - Consigna devanado B
|
|
Valor de encoder | ||||
PtP Perfil de posicionamiento Generador | ||||
Limit Voltage – limitación de tensión
0x8680-04 - Alimentación de potencia - Tensión advertencia límite inferior |
→
|
Limit Voltage
|
→
|
int. PS Etapa de salida de potencia interna (power stage)
|
0x8680-05 - Alimentación de potencia - Tensión advertencia límite superior | ||||
0x8680-06 - Alimentación de potencia - Tensión fallo límite inferior | ||||
0x8680-07 - Alimentación de potencia - Tensión fallo límite superior |
SP interna – etapa de salida de potencia, motor, encoder
Limit Voltage Limitación de tensión |
→
|
int. PS
|
→
| Motor Encoder 0x8F00-02 - Encoder - Valor real
|
Current control Regulador de corriente |
