Bucle cerrado - Control de campo orientado (FOC)
El bucle cerrado tiene las siguientes características:
- El módulo de función opera en funcionamiento controlado mediante una estructura de regulación en cascada.
- La señal del encoder influye en el control.
- La consigna para el regulador de corriente la genera el lazo de regulación de nivel superior.
- La posición real se corresponde con el valor de encoder normalizado a posición.
- Se emite un valor de encoder.
Estructura
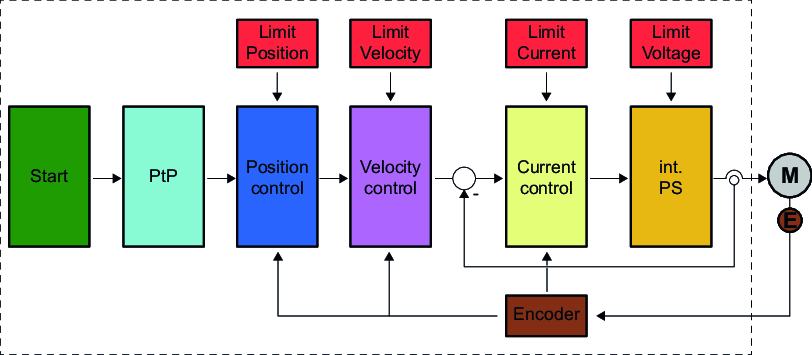
Estructura
Start | Parámetro de inicio |
Limit Position | Limitación de posicionamiento |
Limit Voltage | Limitación de tensión |
Position control | Regulador de posición |
Current control | Regulador de corriente |
M | Motor |
Limit Velocity | Limitación de velocidad |
Limit Current | Limitación de corriente |
PtP | Perfil de posicionamiento PtP |
int. PS | Etapa de salida de potencia interna (power stage) |
Encoder | Valor real de encoder |
Principio de funcionamiento
El término "bucle cerrado" hace referencia a un lazo de regulación cerrado. En un lazo de regulación cerrado, una variable de regulación se mantiene en una consigna, a pesar de los factores de perturbación que afecten al sistema desde el exterior. En un motor tipo stepper o paso a paso, el regulador registra la posición del rotor a través de las señales del encoder. Para la regulación orientada al campo, también llamada "regulación vectorial", el regulador genera solo corrientes de fase elevadas para los devanados del motor, que son necesarias para compensar la desviación de regulación. Dado que el flujo de corriente en el estator y el rotor es homogéneo y se mantiene un ángulo eléctrico de 90°, se obtiene un par regulado máximo con una ondulación reducida. Esto asegura un motor de marcha suave junto con una potencia de motor homogénea. Se puede regular con precisión, incluso en condiciones de funcionamiento cambiantes. Dado que un encoder incremental no proporciona valores absolutos, no hay relación directa con la posición del rotor al inicio del sistema. Esta referencia se debe establecer mediante una Detección de conmutación al iniciar el sistema.
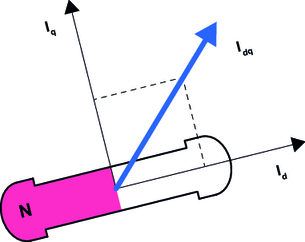
En la regulación orientada al campo, un accionamiento se regula mediante un componente formador de campo y generador de par. Para el desacoplamiento de ambos componentes se lleva a cabo una transformación matemática en un sistema de coordenadas que gira alrededor del eje del rotor con el flujo magnético. En esta "transformación de Park" se calculan dos componentes de corriente a partir de las corrientes de fase, Id, de "directo", en la dirección del campo, e Iq, de "cuadratura", en la dirección formadora de par. De este modo, las magnitudes intercambiables se convierten en constantes estacionarias, de modo que el motor puede regularse mediante la magnitud de corriente generadora de par Iq como una máquina de corriente continua. En bucle cerrado se utilizan los siguientes objetos:
Bucle cerrado | |
|---|---|
3: Bucle cerrado (FOC) | |
Valor de encoder normalizado a posición. | |
Especificación de la posición de consigna | |
Valor de encoder | |
