Closed loop - controllo orientato al campo (FOC)
Closed loop ha le caratteristiche seguenti:
- Il modulo funzionale lavora nella modalità regolata mediante una struttura regolatore a cascata.
- Il segnale encoder è contemplato dalla regolazione.
- Il riferimento per il regolatore di corrente viene generato dal circuito di regolazione sovraordinato.
- La posizione reale corrisponde al valore encoder normalizzato su posizione.
- Viene emesso un valore encoder.
Struttura
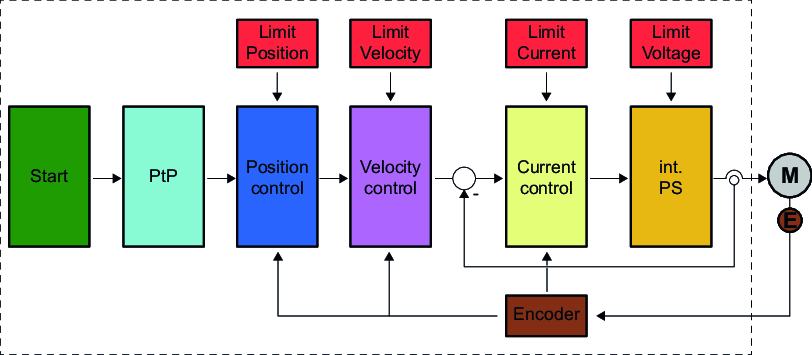
Struttura
Start | Parametri di avvio |
Limit Position | Limite di posizione |
Limit Voltage | Limitazione di tensione |
Position control | Controllore posizione |
Current control | Regolatore di corrente |
M | Motore |
Limit Velocity | Limite di velocità |
Limit Current | Limitazione di corrente |
PtP | Profilo di posizione PtP |
int. PS | Stadio finale di potenza interno (power stage) |
Encoder | Valore reale encoder |
Modo di funzionamento
L'espressione "closed loop" definisce un circuito di regolazione chiuso. In un circuito di regolazione chiuso la grandezza regolata viene mantenuta sul riferimento, nonostante i fattori di disturbo che influenzano il sistema dall'esterno. Nel motore passo passo il regolatore rileva la posizione del rotore tramite i segnali encoder. Per il controllo orientato al campo, detto anche "controllo vettoriale", vengono generate attraverso il regolatore delle correnti di fase negli avvolgimenti del motore solo con la forza necessaria ai fini della compensazione dello scarto controllo. In questo caso, il flusso di corrente nello statore e nel rotore è uniforme e viene rispettato l'angolo elettrico di 90°, ottenendo così una coppia massima controllata con minore ondulazione. Ciò garantisce un motore silenzioso con una forza motore uniforme. Questo può essere regolato con precisione anche in caso di condizioni di esercizio variabili. Dal momento che un encoder incrementale non fornisce valori assoluti, non esiste una relazione diretta con la posizione del rotore all'avvio del sistema. Questa relazione deve essere creata all'avvio del sistema mediante Ricerca di commutazione.
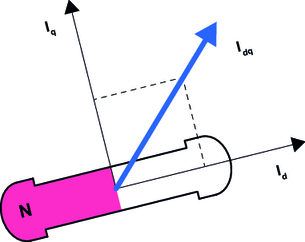
Nel controllo orientato al campo l'azionamento viene controllato tramite un componente generante campo e generante coppia. Per il disaccoppiamento di entrambi i componenti ha luogo una trasformazione matematica in un sistema di coordinate, che ruota con il flusso magnetico intorno all'asse rotore. In questa "trasformata di Park" vengono calcolate dalle correnti di fase due componenti elettrici, Id, per "diretto" in direzione campo e Iq per "quadratura" in direzione generante coppia. Con ciò le grandezze alternate diventano grandezze continue stazionarie, che consentono di controllare il motore come una macchina a corrente continua tramite la grandezza di corrente generante coppia Iq. In closed loop si usano gli oggetti seguenti:
Closed loop | |
|---|---|
3: closed loop (FOC) | |
Valore encoder normalizzato su posizione. | |
Specifica della posizione nominale | |
Valore encoder | |
