Closed Loop - Feldorientierte Regelung (FOC)
Der Closed Loop hat folgende Eigenschaften:
- Das Funktionsmodul arbeitet im geregelten Betrieb mittels einer kaskadierten Reglerstruktur.
- Das Gebersignal geht in die Regelung mit ein.
- Der Sollwert für den Stromregler wird vom übergeordneten Regelkreis erzeugt.
- Die Istposition entspricht dem Geberwert auf Position normiert.
- Ein Geberwert wird ausgegeben.
Struktur
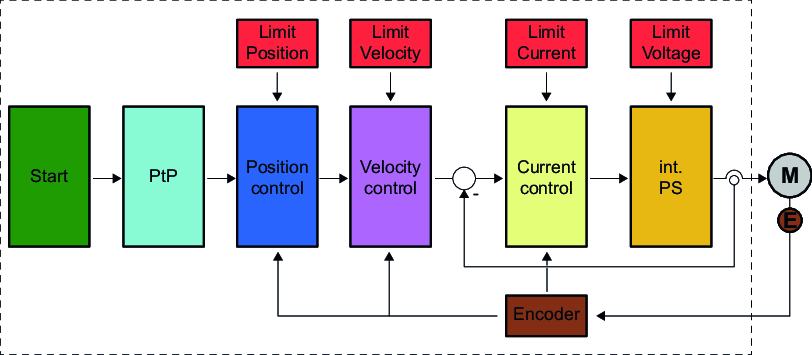
Struktur
Start | Startparameter |
Limit Position | Positionsbegrenzung |
Limit Voltage | Spannungsbegrenzung |
Position control | Lageregler |
Current control | Stromregler |
M | Motor |
Limit Velocity | Drehzahlbegrenzung |
Limit Current | Strombegrenzung |
PtP | PtP-Positionsprofil |
int. PS | Interne Leistungsendstufe (power stage) |
Encoder | Geber-Istwert |
Funktionsweise
Der Ausdruck "Closed Loop" bezeichnet einen geschlossenen Regelkreis. In einem geschlossenen Regelkreis wird eine Regelgröße auf einem Sollwert gehalten, trotz Störfaktoren, welche das System von außen beeinflussen. Bei einem Steppermotor erfasst der Regler über die Gebersignale die Lage des Rotors. Zur feldorientierten Regelung, auch "Vektorregelung" genannt, werden durch den Regler nur so hohe Phasenströme in den Motorwicklungen erzeugt, welche zum Ausgleich der Regelabweichung erforderlich sind. Da hierbei der Stromfluss in Stator und Rotor gleichmäßig ist und ein elektrischer Winkel von 90° eingehalten wird, erhalten Sie ein maximal geregeltes Drehmoment mit verminderter Welligkeit. Dies sorgt für einen laufruhigen Motor mit einer gleichmäßigen Motorkraft. Dieser lässt sich, auch bei wechselnden Betriebsbedingungen, genau regeln. Da ein Inkrementalencoder keine Absolutwerte liefert, besteht beim Systemstart kein direkter Bezug zur Position des Rotors. Dieser Bezug ist bei einem Systemstart mittels einer Kommutierungsfindung herzustellen.
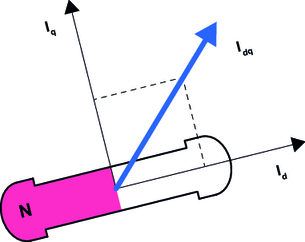
Bei der feldorientierten Regelung wird ein Antrieb über eine feldbildende und drehmomentbildende Komponente geregelt. Für die Entkopplung beider Komponenten erfolgt eine mathematische Transformation in ein Koordinatensystem, welches mit dem magnetischen Fluss um die Rotorachse rotiert. Bei dieser "Park-Transformation" werden aus den Phasenströmen zwei Stromkomponenten, Id, für "direkt" in Feldrichtung und Iq für "quadratur" in drehmomentbildender Richtung, berechnet. Hierdurch werden aus den Wechselgrößen stationäre Gleichgrößen, wodurch der Motor über die drehmomentbildende Stromgröße Iq wie eine Gleichstrommaschine geregelt werden kann. Unter Closed Loop kommen folgende Objekte zum Einsatz:
Closed Loop | |
|---|---|
3: Closed Loop (FOC) | |
Geberwert auf Position normiert. | |
Vorgabe der Sollposition | |
Geberwert | |
