Pseudo Closed Loop
- Das Funktionsmodul arbeitet im "pseudo"-geregeltem Betrieb.
- Immer am Ende eines Verfahrprofils wird das Gebersignal ausgewertet und über den Profilgenerator eine Positionskorrektur angestoßen.
- Das Gebersignal geht in die Regelung mit ein.
- Der Sollwert für den Stromregler wird vom übergeordneten Profilgenerator erzeugt.
- Die Istposition entspricht dem Wert des Gebers auf Position normiert.
- Ein Geber-Wert wird ausgegeben.
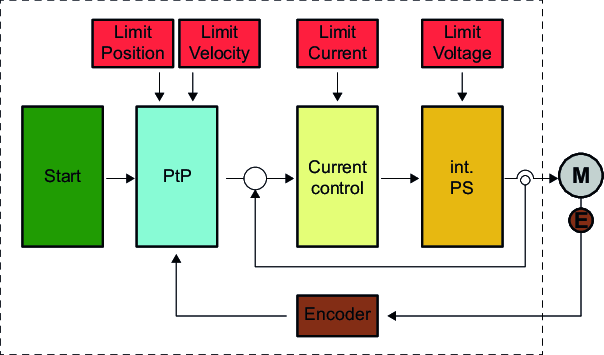
Struktur
Start | Startparameter |
Limit Position | Positionsbegrenzung |
Limit Voltage | Spannungsbegrenzung |
Position control | Lageregler |
Current control | Stromregler |
M | Motor |
Limit Velocity | Drehzahlbegrenzung |
Limit Current | Strombegrenzung |
PtP | PtP-Positionsprofil |
int. PS | Interne Leistungsendstufe (power stage) |
Encoder | Geber-Istwert |
Funktionsweise
In der Betriebsart Pseudo Closed Loop wird der Sollwert für den Stromregler vom übergeordneten Profilgenerator erzeugt. Lage- und Drehzahlregelkreis sind nicht geschlossen und somit wird das Gebersignal in den Regelkreisen nicht ausgewertet. Im Gegensatz zu Open Loop wird unter Pseudo Closed Loop nach dem Ende eines Profil-Verfahrens das Gebersignal ausgewertet und ggf. eine Positionskorrektur über den Profilgenerator angestoßen. Unter Pseudo Closed Loop kommen folgende Objekte zum Einsatz:
Pseudo Closed Loop | |
|---|---|
5: Einstellung "Pseudo Closed Loop" | |
Im Statuswort wird "Zielposition erreicht" Bit 10 gesetzt, wenn die Abweichung von der Sollposition kleiner ist als das parametrierte Zielfenster. | |
Über dieses Objekt kann die Abweichung zwischen Soll- und Istwert abgerufen werden. | |
Über dieses Objekte können Sie eine Grenze angeben, bei deren Überschreitung über Bit 8 eine Warnung ausgegeben werden soll. | |
Über dieses Objekte können Sie eine Grenze angeben, bei deren Überschreitung über Bit 8 ein Fehler ausgegeben werden soll. Zusätzlich wechselt das Modul im Fehlerfall in den Fehlerzustand mit Positionierfehler 0x8611. | |
Während der Positionskorrektur bleibt Bit 12 im Statuswort gesetzt. | |
0x8480-17 - Pseudo Closed Loop: Anzahl Korrekturzyklen | Über dieses Objekt definieren Sie die Anzahl der Korrekturzyklen. |
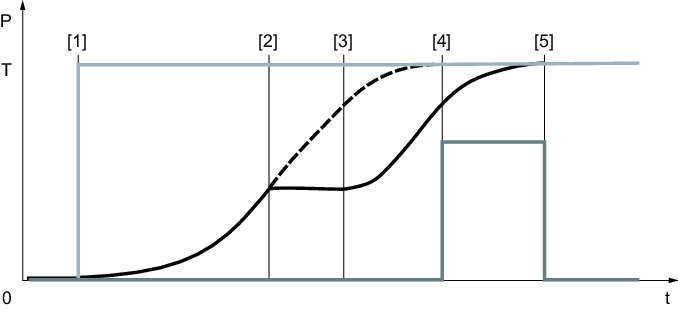
[P] | Istposition. |
[T] | Sollposition |
[t] | Zeitachse |
[1] | 1. Profil-Verfahren wird gestartet. Der Antrieb ist frei. |
[2] | Profil-Verfahren läuft weiter bei blockiertem Antrieb. |
[3] | Profil-Verfahren läuft weiter. Blockade des Antriebs ist wieder aufgehoben. |
[4] | Profil-Verfahren ist abgeschlossen. Aufgrund der hohen Regelabweichung wird das 2. Profil-Verfahren gestartet. |
[5] | Istposition entspricht der Sollposition und Profil-Verfahren wird beendet. |
