伪闭环
- 功能模块以“伪”控制的方式工作。
- 编码器信号始终在行程配置文件结束时进行评估,并通过配置文件生成器启动位置校正。
- 编码器信号包含在控制中。
- 电流控制器的设定值由更高级别的配置文件生成器生成。
- 实际位置对应于标准化为位置的编码器的值。
- 输出编码器值。
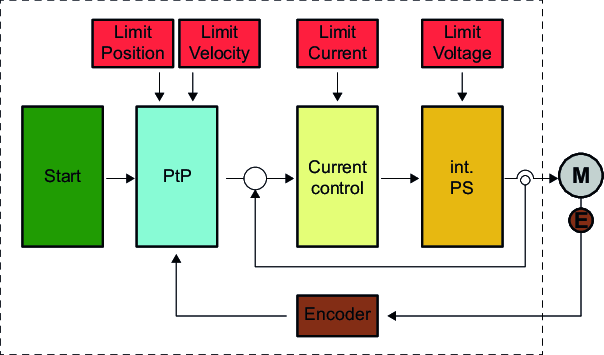
结构
Start | 启动参数 |
Limit Position | 位置限制 |
Limit Voltage | 电压限制 |
Position control | 位置控制器 |
Current control | 电流控制器 |
M | 电机 |
Limit Velocity | 转速限制 |
Limit Current | 电流限制 |
PtP | PtP位置配置文件 |
int. PS | 内部功率输出级 (power stage) |
Encoder | 编码器实际值 |
工作原理
在伪闭环操作模式下,电流控制器的设定值由更高级别的配置文件生成器生成。位置和转速控制回路不是闭合的,因此在控制回路中不会评估编码器信号。与开环相反,在伪闭环下,编码器信号在配置文件过程结束后进行评估,并且如有必要,通过配置文件生成器启动位置校正。在伪闭环下使用以下对象:
伪闭环 | |
|---|---|
5:“伪闭环”设置 | |
如果与设定位置的偏差小于参数设定的目标窗口,则在状态字中设置“已到达目标位置”位10。 | |
可以通过该对象检索设定值和实际值之间的偏差。 | |
您可以使用此对象指定一个限制,超过该限制时应通过位8发出警告。 | |
您可以使用此对象指定一个限制,超过该限制时应通过位8发出故障。 此外,如果发生故障,模块会切换到定位故障0x8611的故障状态。 | |
在位置校正期间,状态字中的位12保持设定状态。 | |
| 您可以使用该对象来定义校正周期数。 |
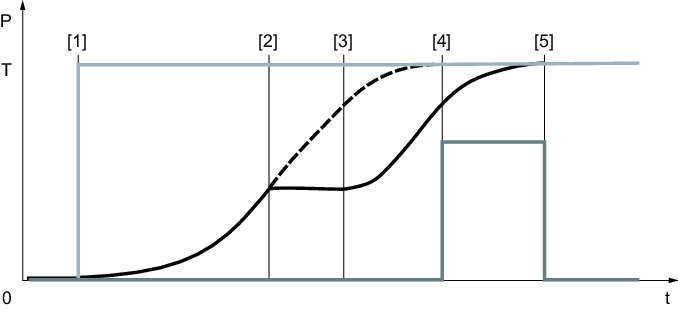
[P] | 实际位置 |
[T] | 设定位置 |
[t] | 时间轴 |
[1] | 第1个配置文件程序开始。驱动装置可用。 |
[2] | 当驱动装置被阻塞时,配置文件程序将继续。 |
[3] | 配置文件程序继续。驱动装置的阻塞再次解除。 |
[4] | 配置文件程序已完成。由于控制偏差较高,开始第2个配置文件程序开始。 |
[5] | 实际位置对应于设定位置并且配置文件程序结束。 |
