Benzetik kapalı döngü
- Fonksiyon modülü "benzetik" kontrollü işletmede çalışır.
- Enkoder sinyali bir hareket profilinin daima sonunda değerlendirilir ve profil üreteci üzerinden bir pozisyon düzeltmesi tetiklenir.
- Enkoder sinyali kontrole dahil olur.
- Akım regülatörü için istenen değer üst seviyedeki profil üreteci tarafından oluşturulur.
- Gerçek pozisyon, pozisyonda standartlaştırılmış enkoder değeridir.
- Bir enkoder değeri verilir.
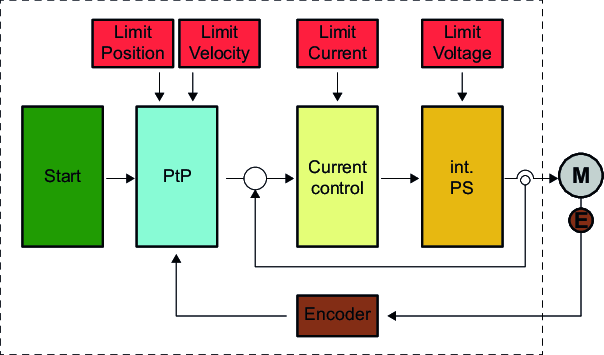
Yapı
Start | Başlatma parametresi |
Limit Position | Pozisyon sınırı |
Limit Voltage | Gerilim sınırı |
Position control | Pozisyon kontrol ünitesi |
Current control | Akım regülatörü |
M | Motor |
Limit Velocity | Hız sınırı |
Limit Current | Akım sınırı |
PtP | PtP pozisyon profili |
int. PS | Dahili güç çıkış katı (power stage) |
Enkoder | Enkoder gerçek değeri |
Çalışma prensibi
Benzetik kapalı döngü çalışma şeklinde akım regülatörü için istenen değer üst seviyedeki profil üreteci tarafından oluşturulur. Konum ve hız kontrol devreleri kapalı değildir ve böylece kontrol devrelerindeki enkoder sinyali değerlendirilmez. Açık döngüye karşıt olarak benzetik kapalı döngü altında bir profil hareketinin bitiminden sonra enkoder sinyali değerlendirilir ve gerekirse profil üreteci üzerinden bir pozisyon düzeltme tetiklenir. Benzetik kapalı döngü altında aşağıdaki nesneler kullanım bulmaktadır:
Benzetik kapalı döngü | |
|---|---|
5: "Benzetik kapalı döngü" ayarı | |
İstenen pozisyondan sapma, parametresi ayarlanan hedef pencereden küçükse, durum kelimesinde "Hedef pozisyona ulaşıldı" bit 10 ayarlanır. | |
Bu nesne üzerinden istenen değer ve gerçek değer arasındaki sapma görülebilir. | |
Bu nesneler üzerinden, aşılması halinde bit 8 üzerinden bir uyarının verileceği bir sınırı belirtebilirsiniz. | |
Bu nesneler üzerinden, aşılması halinde bit 8 üzerinden bir hatanın verileceği bir sınırı belirtebilirsiniz. Buna ek olarak modül, hata durumunda 0x8611 pozisyonlama hatasıyla hata durumuna geçer. | |
Pozisyon düzeltme esnasında durum kelimesindeki bit 12 ayarlanmış olarak kalır. | |
0x8480-17 - Benzetik kapalı döngü: Düzeltme çevrimlerinin sayısı | Bu nesne üzerinden düzeltme çevrimlerinin sayısı tanımlanır. |
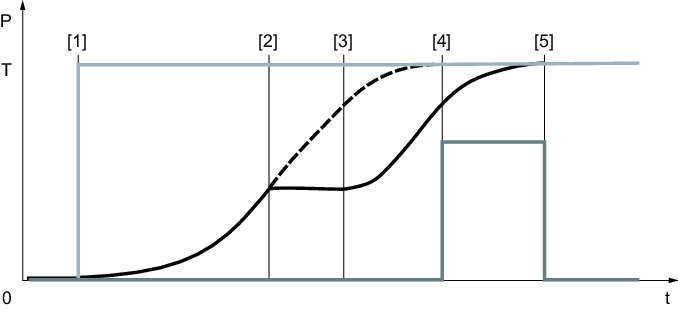
[P] | Gerçek pozisyon. |
[T] | İstenen pozisyon |
[t] | Zaman ekseni |
[1] | 1. Profil hareketi başlatılır. Tahrik serbesttir. |
[2] | Profil hareketi blokeli tahrikte çalışmaya devam eder. |
[3] | Profil hareketi çalışmaya devam eder. Tahrikin blokajı tekrar kaldırıldı. |
[4] | Profil hareketi tamamlandı. Yüksek standart sapma yüzünden 2. profil hareketi başlatılır. |
[5] | Gerçek pozisyon istenen pozisyonla aynıdır ve profil hareketi sona erer. |
