Pseudo closed loop
- Il modulo funzionale lavora nella modalità "pseudo"-regolata.
- Sempre alla fine del profilo di avanzamento viene valutato il segnale encoder e attivata una correzione posizione tramite il generatore profili.
- Il segnale encoder è contemplato dalla regolazione.
- Il riferimento per il regolatore di corrente viene generato dal generatore profilo sovraordinato.
- La posizione reale corrisponde al valore dell'encoder normalizzato su posizione.
- Il valore encoder viene emesso.
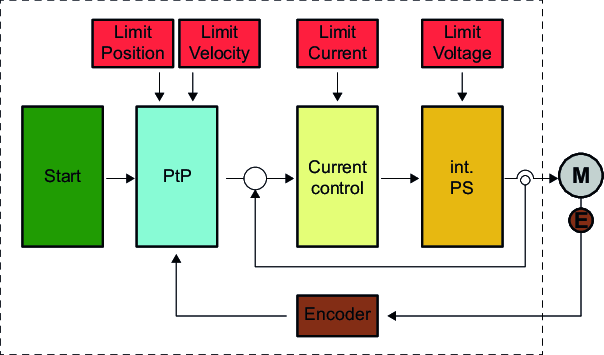
Struttura
Start | Parametri di avvio |
Limit Position | Limite di posizione |
Limit Voltage | Limitazione di tensione |
Position control | Controllore posizione |
Current control | Regolatore di corrente |
M | Motore |
Limit Velocity | Limite di velocità |
Limit Current | Limitazione di corrente |
PtP | Profilo di posizione PtP |
int. PS | Stadio finale di potenza interno (power stage) |
Encoder | Valore reale encoder |
Modo di funzionamento
Nel modo operativo pseudo closed loop il riferimento per il regolatore di corrente viene generato dal generatore di profilo sovraordinato. Il circuito di regolazione della posizione e quello della velocità non sono chiusi e quindi il segnale encoder non viene valutato nei circuiti di regolazione. A differenza di open loop, in pseudo closed loop viene valutato il segnale encoder al termine della procedura profilo ed eventualmente, attivata una correzione posizione tramite il generatore profili. In pseudo closed loop si usano gli oggetti seguenti:
Pseudo closed loop | |
|---|---|
5: impostazione "Pseudo closed loop" | |
Nella parola di stato viene impostato bit 10 "Posizione di destinazione raggiunta" se lo scostamento dalla posizione nominale è inferiore alla finestra di destinazione parametrizzata. | |
Tramite quest'oggetto è possibile accedere allo scostamento fra valore reale e riferimento. | |
Tramite quest'oggetto può essere indicato un limite, quando viene superato deve essere emessa un'avvertenza tramite bit 8. | |
Tramite quest'oggetto può essere indicato un limite, quando viene superato deve essere emessa un'anomalia tramite bit 8. Inoltre, quando si verifica un'anomalia il modulo passa nello stato di anomalia con l'errore di posizionamento 0x8611. | |
Durante la correzione posizione rimane impostato bit 12 nella parola di stato. | |
0x8480-17 - pseudo closed loop: numero di cicli di correzione | Tramite questo oggetto va definito il numero di cicli di correzione. |
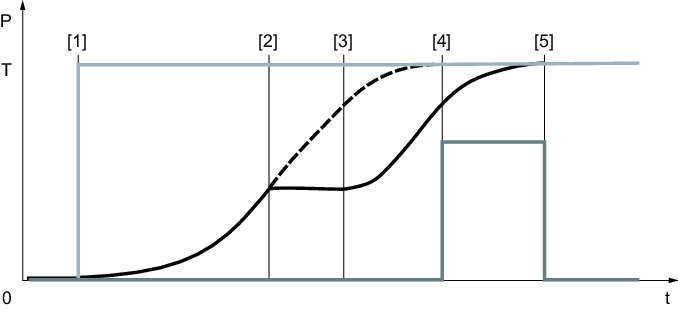
[P] | Posizione reale. |
[T] | Posizione nominale |
[t] | Asse temporale |
[1] | 1. La procedura profilo viene avviata. L'azionamento è libero. |
[2] | La procedura profilo continua con l'azionamento bloccato. |
[3] | La procedura profilo continua. Il blocco dell'azionamento è nuovamente revocato. |
[4] | La procedura profilo è conclusa. A causa dello scarto controllo elevato viene avviata la 2a procedura profilo. |
[5] | La posizione reale corrisponde alla posizione nominale e la procedura profilo viene terminata. |
