Bucle pseudocerrado
- El módulo de función opera en funcionamiento "pseudocontrolado".
- Al final de un perfil de desplazamiento, siempre se evalúa la señal de encoder y se inicia una corrección de posicionamiento a través del generador de perfiles.
- La señal del encoder influye en el control.
- La consigna para el regulador de corriente la genera el generador de perfiles de nivel superior.
- La posición real se corresponde con el valor de encoder normalizado a posición.
- Se emite un valor de encoder.
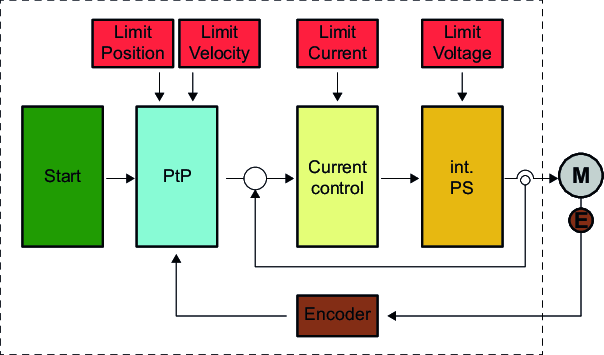
Estructura
Start | Parámetro de inicio |
Limit Position | Limitación de posicionamiento |
Limit Voltage | Limitación de tensión |
Position control | Regulador de posición |
Current control | Regulador de corriente |
M | Motor |
Limit Velocity | Limitación de velocidad |
Limit Current | Limitación de corriente |
PtP | Perfil de posicionamiento PtP |
int. PS | Etapa de salida de potencia interna (power stage) |
Encoder | Valor real de encoder |
Principio de funcionamiento
En el modo de funcionamiento de bucle pseudocerrado, el valor de consigna para el regulador de corriente es generado por el generador de perfiles de nivel superior. Los lazos de regulación de posición y velocidad no están cerrados y por ello no se evalúa la señal de encoder en los lazos de regulación. A diferencia del bucle abierto, bajo bucle pseudocerrado se evalúa la señal del encoder tras el final de un movimiento de perfil y en caso necesario se inicia una corrección de posicionamiento a través del generador de perfiles. Bajo bucle pseudocerrado se emplean los siguientes objetos:
Bucle pseudocerrado | |
|---|---|
5: Configuración "Bucle pseudocerrado" | |
En la palabra de estado, "Posición de destino alcanzada" se establece en 10 bits si la desviación de la posición de consigna es menor que la ventana de destino parametrizada. | |
A través de este objeto se puede consultar la diferencia entre el valor de consigna y el valor real. | |
A través de este objeto puede indicar un límite, de forma que al sobrepasarlo se emita una advertencia mediante el bit 8. | |
A través de este objeto puede indicar un límite, de forma que al sobrepasarlo se emita un fallo mediante el bit 8. Además, en caso de fallo, el módulo cambia al estado de fallo con fallo de posicionamiento 0x8611. | |
Durante la corrección de posicionamiento, el bit 12 permanece establecido en la palabra de estado. | |
0x8480-17 - bucle pseudocerrado: número ciclos de corrección | A través de este objeto puede definir el número de ciclos de corrección. |
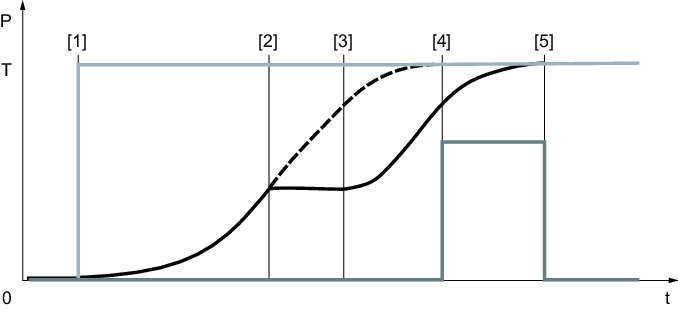
[P] | Posición real. |
[T] | Posición de consigna |
[t] | Eje de tiempo |
[1] | Se inicia el 1.º movimiento de perfil. El accionamiento está libre. |
[2] | El movimiento de perfil se mantiene con el accionamiento bloqueado. |
[3] | El movimiento de perfil se mantiene. El bloqueo del accionamiento se ha levantado. |
[4] | El movimiento de perfil ha finalizado. Debido a la elevada desviación de regulación, se inicia el 2.º movimiento de perfil. |
[5] | La posición real se corresponde con la posición de consigna y el movimiento de perfil finaliza. |
