Pseudo Closed Loop
- O módulo funcional opera no modo "pseudo" controlado.
- O sinal do encoder é sempre avaliado no final de um perfil de deslocamento e uma correção de posição é iniciada através do gerador de perfil.
- O sinal do encoder está incluído no controle de malha fechada.
- O valor nominal do controlador de corrente é gerado pelo gerador de perfil de nível superior.
- A posição atual corresponde ao valor do encoder padronizado para a posição.
- É emitido um valor do encoder.
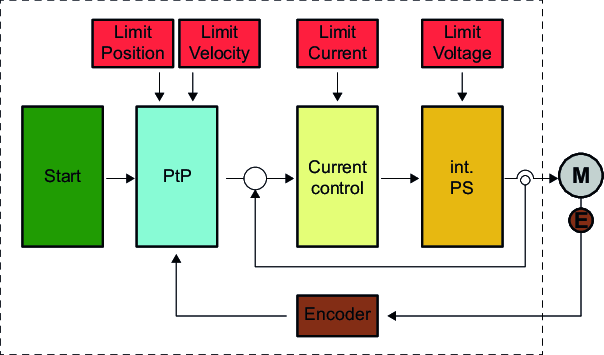
Estrutura
Início | Parâmetros iniciais |
Limit Position | Limitação de posição |
Limit Voltage | Limitação de tensão |
Position control | Controlador de posição |
Current control | Controlador de corrente |
M | Motor |
Limit Velocity | limitação de rotação |
Limit Current | Limitação de corrente |
PtP | perfil de posição PtP |
int. PS | Estágio de potência de saída interno (power stage) |
Encoder | Valor atual do encoder |
Princípio de operação
No modo de operação Pseudo Closed Loop, o valor nominal do controlador de corrente é gerado pelo gerador de perfil de nível superior. Os circuitos do controlador de posição e rotação não estão fechados e, portanto, o sinal do encoder não é avaliado nas malhas fechadas. Ao contrário do Open Loop, no Pseudo Closed Loop o sinal do encoder é avaliado após o final de um processo de perfil e, se necessário, é iniciada uma correção de posição através do gerador de perfil. Os seguintes objetos são usados em Pseudo Closed Loop:
Pseudo Closed Loop | |
|---|---|
5: configuração "Pseudo Closed Loop" | |
O bit 10 "Posição final atingida" é definido na palavra de estado se o desvio da posição nominal for menor que a janela de destino parametrizada. | |
O desvio entre o valor nominal e o valor atual pode ser recuperado através desse objeto. | |
É possível usar esse objeto para especificar um limite que deve ser excedido e um aviso deve ser emitido via bit 8. | |
É possível usar esse objeto para especificar um limite que deve ser excedido e uma irregularidade deve ser emitida via bit 8. Além disso, em caso de irregularidade, o módulo muda para o estado de irregularidade com irregularidade de posicionamento 0x8611. | |
O bit 12 na palavra de estado permanece definido durante a correção da posição. | |
0x8480-17 - Pseudo Closed Loop: número de ciclos de correção | Esse objeto é usado para definir o número de ciclos de correção. |
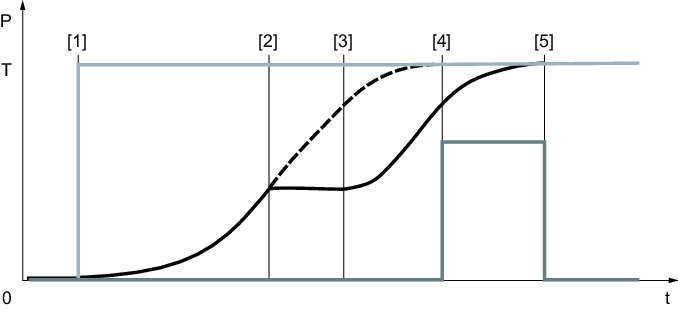
[P] | Posição atual. |
[T] | Posição nominal |
[t] | Eixo temporal |
[1] | 1. O processo de perfil é iniciado. O acionamento está livre. |
[2] | O processo de perfil continua se o acionamento estiver bloqueada. |
[3] | O processo de perfil continua. O bloqueio do acionamento é removido novamente. |
[4] | O processo de perfil foi concluído. Devido à elevada tolerância de controle, o 2º processo de perfil é iniciado. |
[5] | A posição atual corresponde à posição nominal e o processo de perfil é finalizado. |
