Configurações do encoder
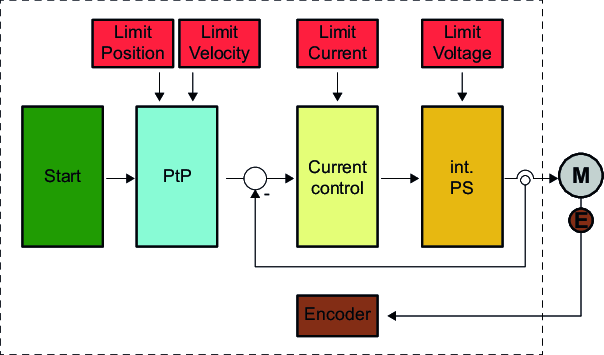
Dependendo da "0x8F00-01 - Configuração da realimentação do encoder" ajustada, o módulo funcional opera em modo de malha aberta ou fechada. É feita uma distinção entre as seguintes configurações de encoder:
Os seguintes perfis de movimento de acordo com o perfil da unidade CiA 402 estão disponíveis para você:
- Referenciamento (homing)
- Detecção de comutação
- perfil de posição PtP
- Perfil de velocidade
- Controle de torque
- posicionamento síncrono
Combinações possíveis
Open Loop | Perfil de posição PtP (1), perfil de velocidade (3), homing (6), posicionamento síncrono (8) | |
|---|---|
"0x8F00-01 - Configuração da realimentação do encoder" | 0: Open Loop |
"0x8280-01 - Modo de operação alvo" | Modo de operação: 1, 3, 6 ou 8 |
"0x8480-02 - Posição atual" | Valor da posição do gerador de perfil. |
"0x8F00-02 - Valor atual do encoder" | 0 (fix) |
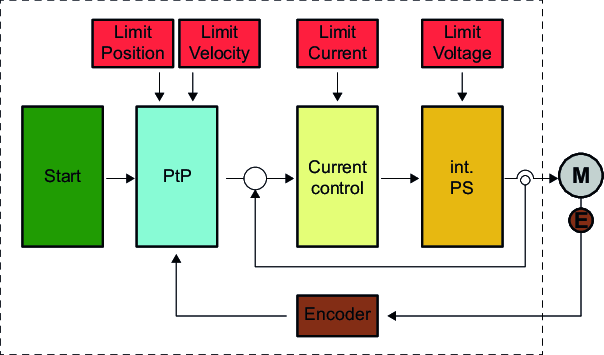
Open Loop | Perfil de posição PtP (1), perfil de velocidade (3), homing (6), posicionamento síncrono (8) | |
|---|---|
"0x8F00-01 - Configuração da realimentação do encoder" | 1: Open Loop |
"0x8280-01 - Modo de operação alvo" | Modo de operação: 1, 3, 6 ou 8 |
"0x8480-02 - Posição atual" | Valor da posição do gerador de perfil. |
"0x8F00-02 - Valor atual do encoder" | Valor do encoder |
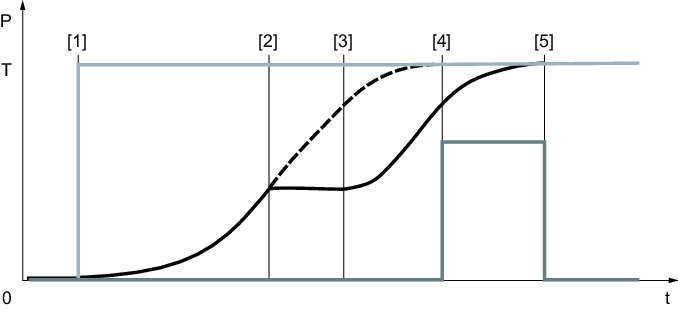
Pseudo Closed Loop | Perfil de posição PtP (1), homing (6) | |
|---|---|
"0x8F00-01 - Configuração da realimentação do encoder" | 5: Pseudo Closed Loop |
"0x8280-01 - Modo de operação alvo" | Modo de operação: 1 ou 6 |
"0x8480-02 - Posição atual" | Valor do encoder padronizado para posição. |
"0x8F00-02 - Valor atual do encoder" | Valor do encoder |
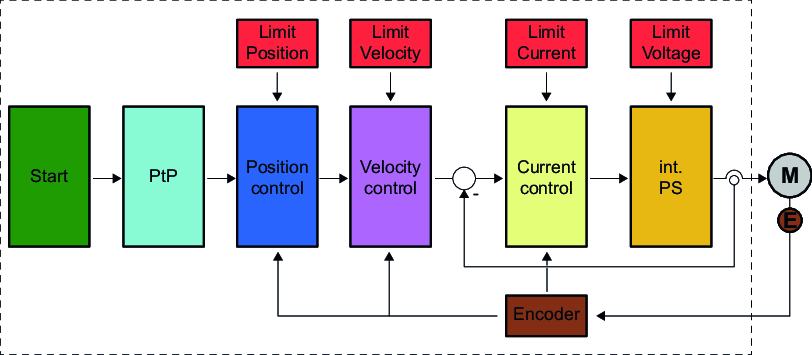
Closed Loop | Perfil de posição PtP (1), perfil de velocidade (3), homing (6), posicionamento síncrono (8), controle de torque (10), detecção de comutação (15) | |
|---|---|
"0x8F00-01 - Configuração da realimentação do encoder" | 3: Closed Loop (FOC) |
"0x8280-01 - Modo de operação alvo" | Modo de operação: 1, 3, 6, 8, 10 ou 15 |
"0x8480-02 - Posição atual" | Valor do encoder padronizado para posição. |
"0x8F00-02 - Valor atual do encoder" | Valor do encoder |