Closed Loop - Controle malha fechada orientado por campo magnético (FOC)
O Closed Loop possui as seguintes propriedades:
- O módulo funcional opera em modo de circuito fechado usando uma estrutura de controlador em cascata.
- O sinal do encoder está incluído no controle de malha fechada.
- O valor nominal do controlador de corrente é gerado pela malha fechada de nível superior.
- A posição atual corresponde ao valor do encoder padronizado para a posição.
- É emitido um valor do encoder.
Estrutura
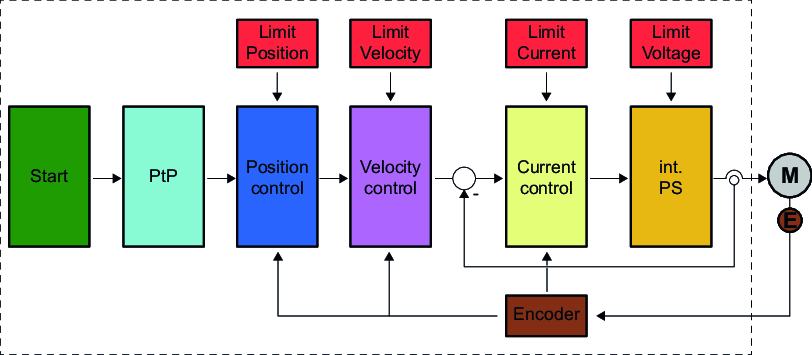
Estrutura
Início | Parâmetros iniciais |
Limit Position | Limitação de posição |
Limit Voltage | Limitação de tensão |
Position control | Controlador de posição |
Current control | Controlador de corrente |
M | Motor |
Limit Velocity | limitação de rotação |
Limit Current | Limitação de corrente |
PtP | perfil de posição PtP |
int. PS | Estágio de potência de saída interno (power stage) |
Encoder | Valor atual do encoder |
Princípio de operação
O termo "Closed Loop" refere-se a uma malha fechada. Em uma malha fechada, uma variável controlada é mantida em um valor nominal, apesar dos fatores de interferência que influenciam o sistema de fora. Em um motor de passo, o controlador detecta a posição do rotor através dos sinais do encoder. Para controle de malha fechada orientado por campo magnético, também chamado de "controle de fluxo pela corrente", o controlador gera apenas correntes de fase nos enrolamentos do motor que sejam altas o suficiente para compensar a tolerância de controle. Como o fluxo de corrente no estator e no rotor é uniforme e um ângulo elétrico de 90° é mantido, você obtém um torque máximo controlado com ripple reduzido. Isso garante um deslocamento suave do motor com potência consistente. Isso pode ser regulado com precisão, mesmo sob condições de operação variáveis. Como um encoder incremental não fornece valores absolutos, não há referência direta à posição do rotor quando o sistema é iniciado. Essa referência deve ser estabelecida durante a inicialização do sistema por meio da Detecção de comutação.
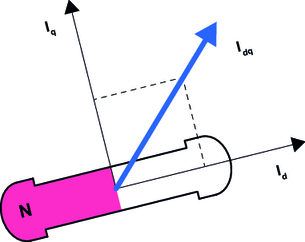
Com o controle de malha fechada orientado por campo magnético, um acionamento é controlado por meio de um componente formador de campo e de torque. Para desacoplar os dois componentes, é realizada uma transformação matemática em um sistema de coordenadas que gira com o fluxo magnético em torno do eixo do rotor. Nessa "transformação de Park", dois componentes de corrente, Id para "direta" na direção do campo e Iq para "quadratura" na direção de formação de torque, são calculados a partir das correntes de fase. Isso transforma as variáveis alternadas em variáveis diretas de estado estável, permitindo que o motor seja controlado como uma máquina de corrente contínua por meio da variável de corrente formadora de torque Iq. Os seguintes objetos são usados em Closed Loop:
Closed Loop | |
|---|---|
3: Closed Loop (FOC) | |
Valor do encoder padronizado para posição. | |
Especificação da posição nominal | |
Valor do encoder | |
