闭环 - 磁场定向控制 (FOC)
闭环具有以下特性:
- 功能模块采用级联控制器结构进行受控操作。
- 编码器信号包含在控制中。
- 电流控制器的设定值由更高级别的控制回路生成。
- 实际位置对应于标准化为位置的编码器值。
- 输出编码器值。
结构
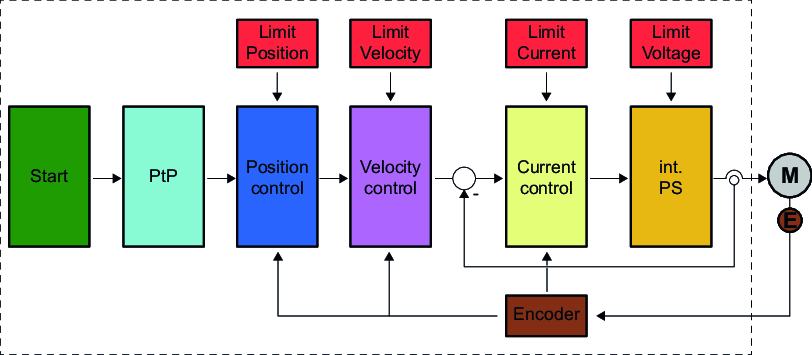
结构
Start | 启动参数 |
Limit Position | 位置限制 |
Limit Voltage | 电压限制 |
Position control | 位置控制器 |
Current control | 电流控制器 |
M | 电机 |
Limit Velocity | 转速限制 |
Limit Current | 电流限制 |
PtP | PtP位置配置文件 |
int. PS | 内部功率输出级 (power stage) |
Encoder | 编码器实际值 |
工作原理
术语“闭环”是指闭环控制。在闭环控制中,尽管外部因素会影响系统,但控制变量仍保持在设定值。在步进电机中,控制器通过编码器信号检测转子的位置。对于磁场定向控制(也称为“矢量控制”),控制器仅在电机绕组中产生足够高的相电流以补偿控制偏差。由于定子和转子中的电流流动均匀,并且保持了90°的电角度,因此您将获得最大程度的调节扭矩,并降低了波动。这确保了电机平稳运行并具有稳定的电机功率。即使在不断变化的运行条件下,也可以对其进行精确调节。由于增量式编码器不提供绝对值,因此系统启动时没有直接参考转子的位置。在系统启动时,需要通过换相查找建立这种参考。
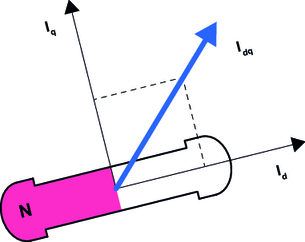
通过磁场定向控制,驱动装置通过磁场形成和扭矩形成的组件进行控制。为了解耦两个组件,需要对坐标系进行数学变换,该坐标系随磁通量绕转子轴旋转。在此“Park变换”中,根据相电流计算两个电流分量:Id(磁场方向上的“直接”电流)和Iq(扭矩产生方向上的“正交”电流)。这将交变变量变成静态恒定变量,从而可以像直流电机一样通过形成扭矩的电流变量Iq来控制电机。在闭环下使用以下对象:
闭环 | |
|---|---|
3:闭环 (FOC) | |
编码器值标准化为位置。 | |
指定设定位置 | |
编码器值 | |
