Kapalı döngü - Alana yönelik kontrol (FOC)
Kapalı döngü aşağıdaki özelliklere sahiptir:
- Fonksiyon modülü, basamaklanmış bir kontrolör yapısı aracılığıyla kontrollü işletmede çalışmaktadır.
- Enkoder sinyali kontrole dahil olur.
- Akım regülatörü için istenen değer üst seviyedeki kontrol devresi tarafından oluşturulur.
- Gerçek pozisyon, pozisyonda standartlaştırılmış enkoder değeridir.
- Bir enkoder değeri verilir.
Yapı
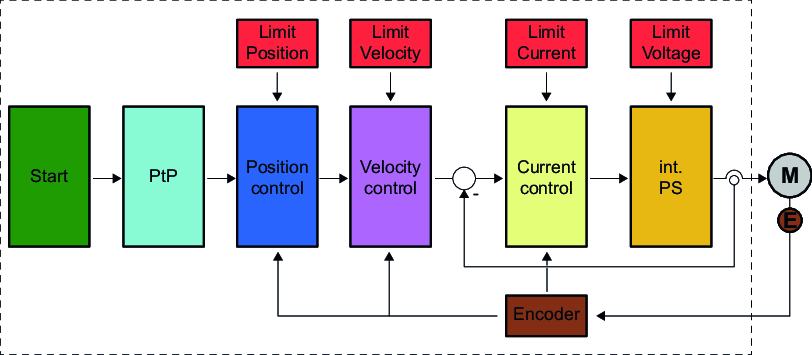
Yapı
Start | Başlatma parametresi |
Limit Position | Pozisyon sınırı |
Limit Voltage | Gerilim sınırı |
Position control | Pozisyon kontrol ünitesi |
Current control | Akım regülatörü |
M | Motor |
Limit Velocity | Hız sınırı |
Limit Current | Akım sınırı |
PtP | PtP pozisyon profili |
int. PS | Dahili güç çıkış katı (power stage) |
Encoder | Enkoder gerçek değeri |
Çalışma prensibi
"Kapalı döngü" terimi kapalı bir kontrol devresini ifade etmektedir. Kapalı bir kontrol devresinde kontrol edilen bir değişken, sistemi dışarıdan etkileyen bozma faktörlerine rağmen istenen bir değerde tutulur. Bir stepper motorunda denetleyici, enkoder sinyalleri üzerinden rotorun konumunu algılar. "Vektör kontrolü" olarak da adlandırılan alana yönelik kontrol için denetleyici yalnızca standart sapmanın dengelenmesine gerek duyulduğu seviyede faz akımlarını motor sargılarında üretir. Burada stator ve rotordaki akının düzgün olması ve 90°'lik elektriksel bir açıya uyulması sebebiyle, azalmış dalgalanmayla maksimum kontrollü bir tork elde edilir. Bu ise, kararlı bir motor kuvvetiyle düzgün çalışan bir motoru sağlar. Bunun, değişen çalışma koşullarında da hassas şekilde kontrol edilmesi mümkündür. Bir artımsal enkoderin mutlak değerler vermemesinden dolayı sistem başlatılırken rotor pozisyonuna doğrudan bir ilgi mevcut değildir. Bu ilgi bir sistem başlatma sırasında bir Komutasyon algılama ile kurulmalıdır.
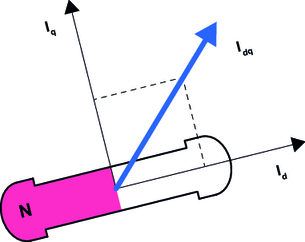
Alana yönelik kontrolde bir tahrik, alan ve tork oluşturucu bir komponent üzerinden kontrol edilir. Her iki komponentin ayrıştırılması için manyetik akıyla birlikte rotor ekseninin etrafında dönen bir koordinat sistemine matematiksel bir dönüşüm uygulanır. Bu "Park dönüşümü"'nde iki akım komponentinin faz akımlarından alan yönünde "doğrudan" için Id ve tork oluşturucu yönde "dördün" için Iq hesaplanır. Böylece değişken değerlerin durağan eşit değerler haline gelmesi sebebiyle motor, tork oluşturucu akım değeri Iq üzerinden bir DC motor gibi kontrol edilebilmektedir. Kapalı döngü altında aşağıdaki nesneler kullanım bulmaktadır:
Kapalı döngü | |
|---|---|
3: Kapalı döngü (FOC) | |
Pozisyonda standartlaştırılmış enkoder değeri. | |
İstenen pozisyonun girdisi | |
Enkoder değeri | |
