Closed loop – Field-oriented control (FOC)
Closed loop has the following features:
- The function module operates with closed-loop control using a cascaded controller structure.
- The encoder signal is taken into account by the controller.
- The setpoint for the current controller is generated by the higher-level closed loop system.
- The actual position corresponds to the encoder value, normalized to position.
- An encoder value is output.
Structure
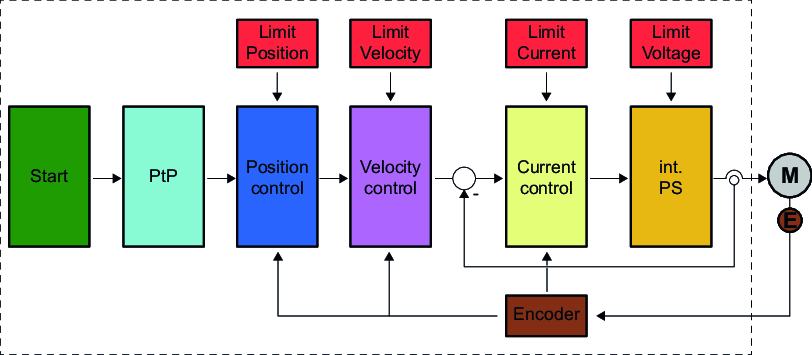
Structure
Start | Start parameter |
Limit Position | Position limiting |
Limit Voltage | Voltage limiting |
Position control | Position controller |
Current control | Current controller |
M | Motor |
Limit Velocity | Speed limitation |
Limit Current | Current limitation |
PtP | PtP position profile |
int. PS | Internal power stage |
Encoder | Actual encoder value |
Operating principle
The term "closed loop" refers to a closed control loop. In a closed control loop, a controlled variable is kept at a setpoint value despite external disturbance factors that may influence the system. With a stepper motor, the controller detects the position of the rotor based on the encoder signals. With field-oriented control, also known as "vector control," the controller generates phase currents in the motor windings that are just high enough to compensate for the control deviation. As the current flow in the stator and rotor is uniform and an electrical angle of 90° is maintained, you obtain optimally controlled torque with reduced ripple. This ensures a smooth-running motor and even motor power. The motor can be precisely controlled, even under changing operating conditions. As an incremental encoder does not provide absolute values, there is no direct reference to the position of the rotor when the system is started. This reference has to be created when the system starts using Commutation detection.
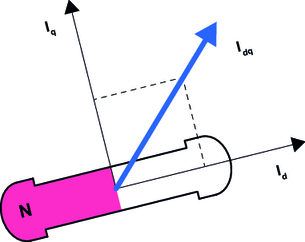
With field-oriented control, a drive is controlled with a field component and a torque component. To decouple the two components, a mathematical transformation is carried out in a coordinate system that rotates about the rotor axis with the magnetic flux. During this "Park transformation," two current components, Id (for "direct") in the field direction and Iq (for "quadrature") in the torque direction are calculated from the phase currents. This turns the alternating variables into stable direct variables, allowing the motor to be controlled like a DC motor via the torque current variable Iq. The following objects are used with closed loop:
Closed loop | |
|---|---|
3: Closed loop (FOC) | |
Encoder value normalized to position. | |
Specification of setpoint position | |
Encoder value | |
