Use
Additional information
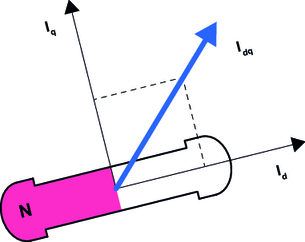
Fundamentals
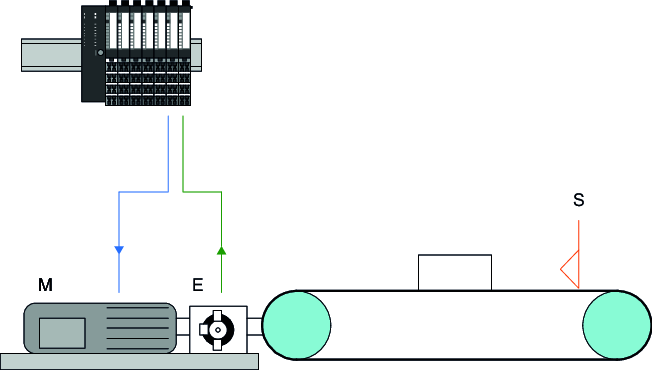
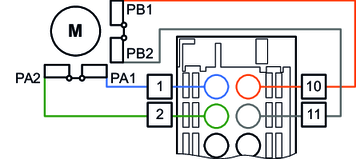
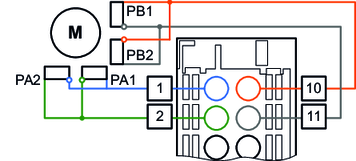
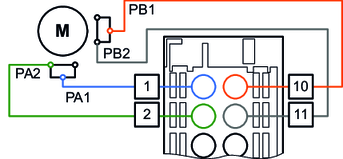
Connecting the stepper motor
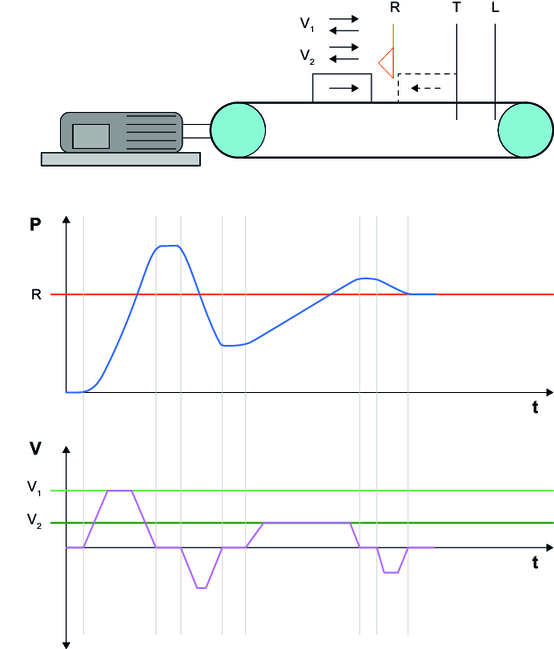
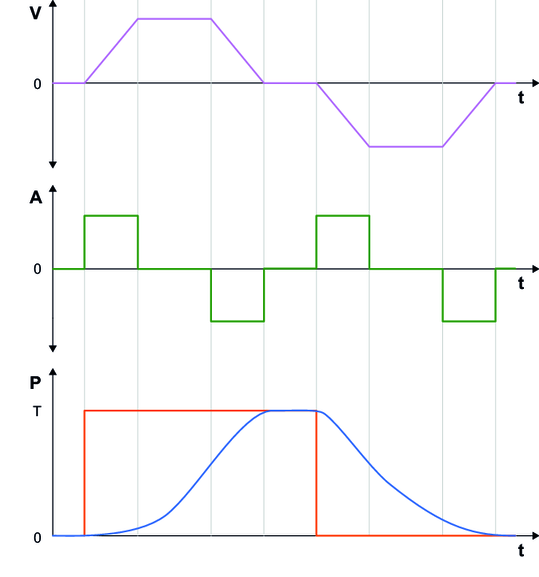
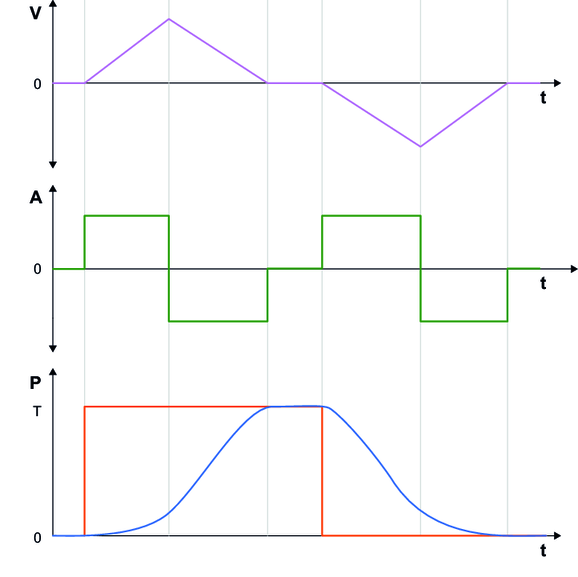
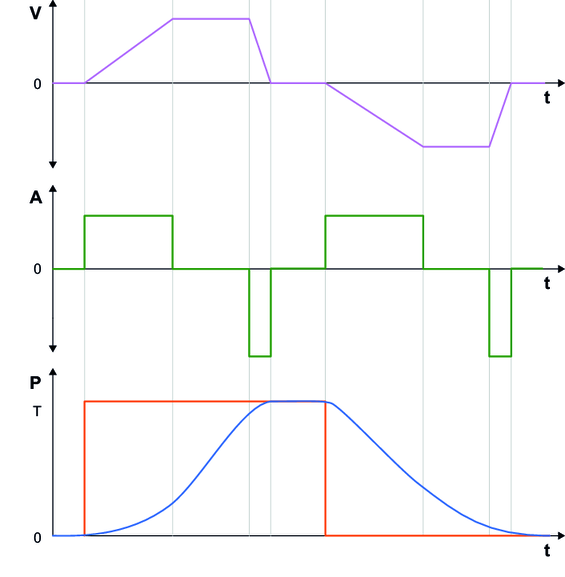
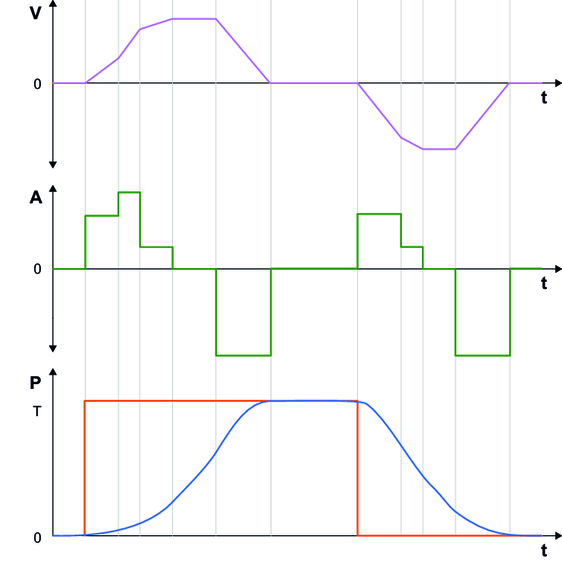
Drive profile
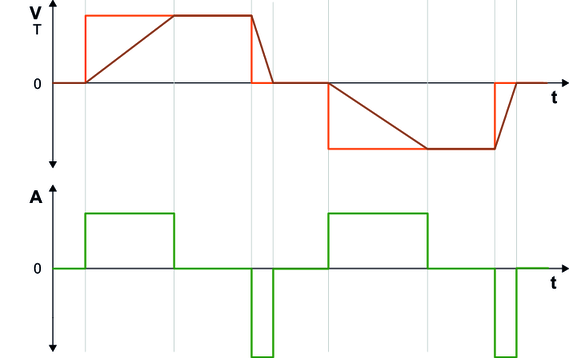
Reference travel (homing)
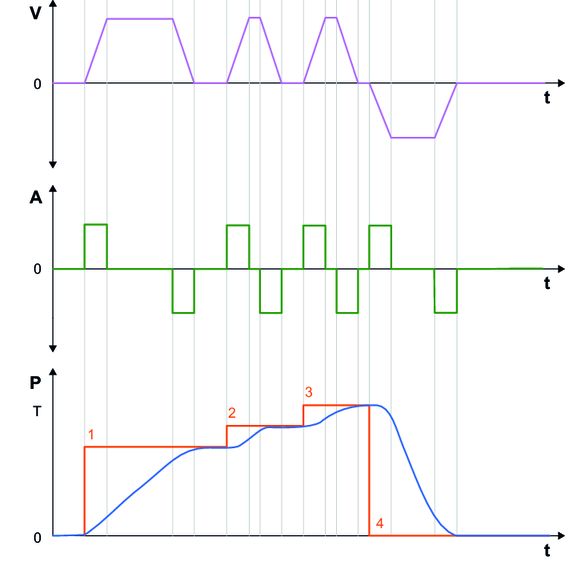
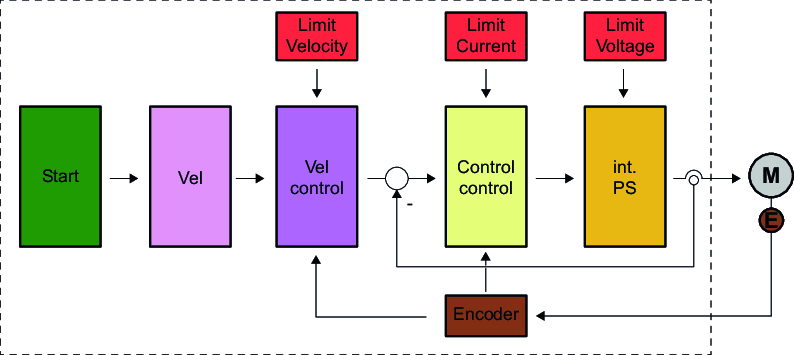
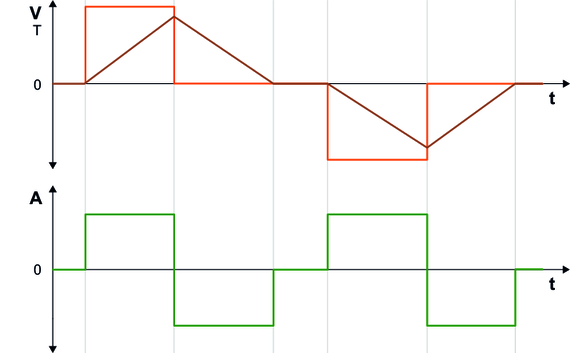
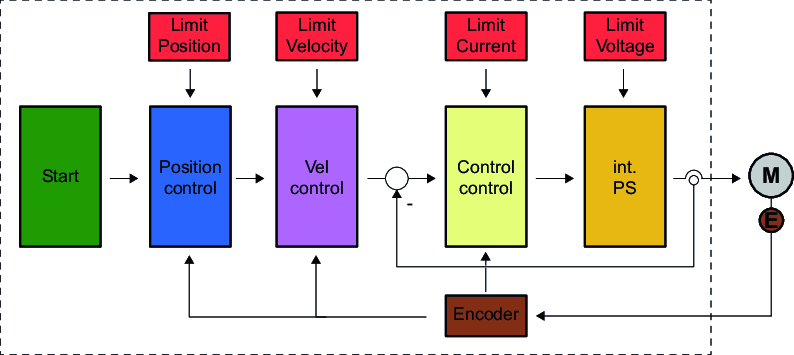
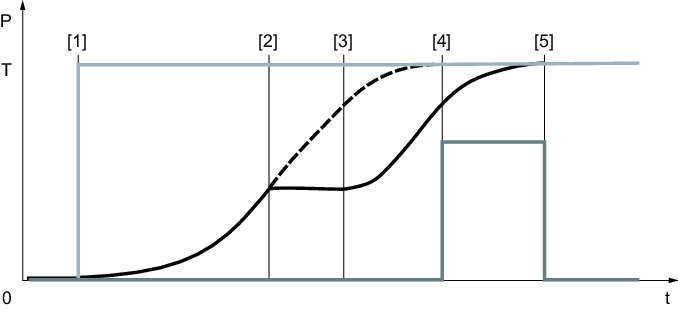
PtP position profile
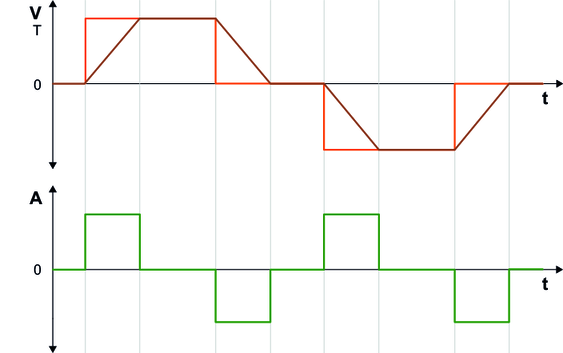
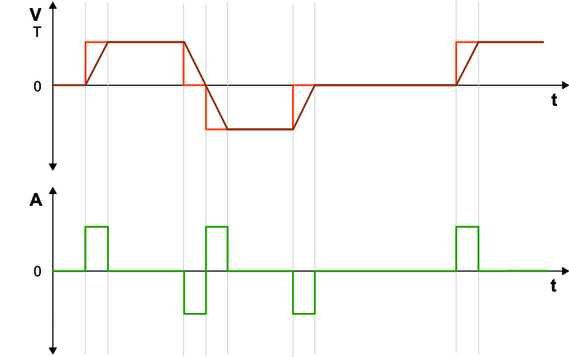
Speed profile
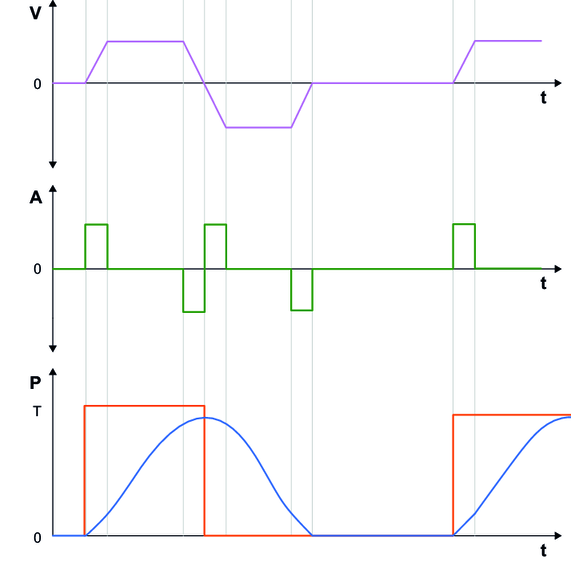
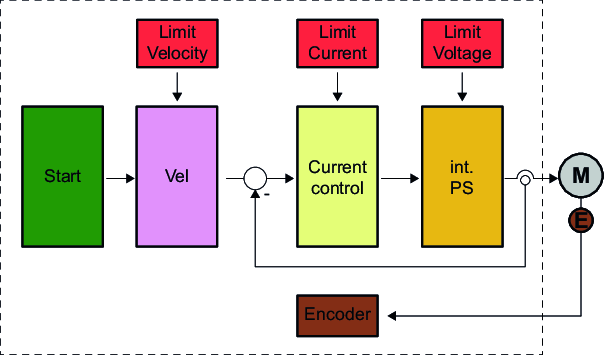
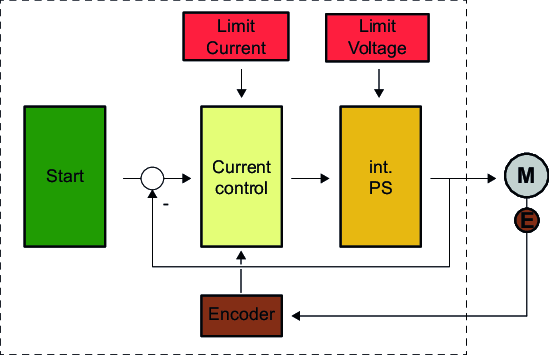
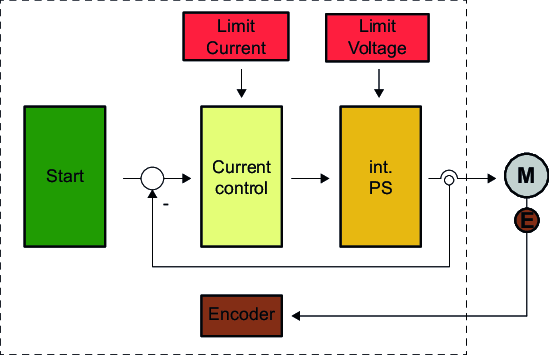
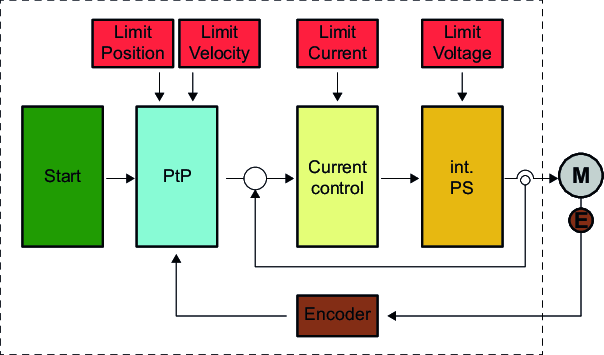
Torque control
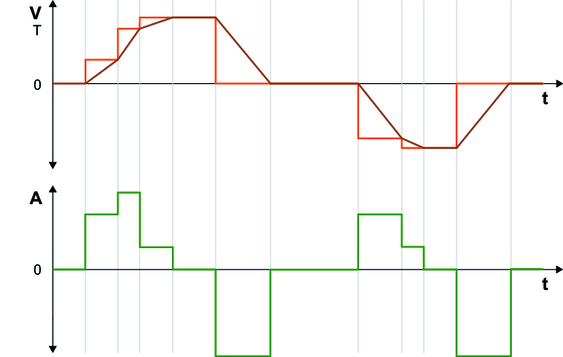
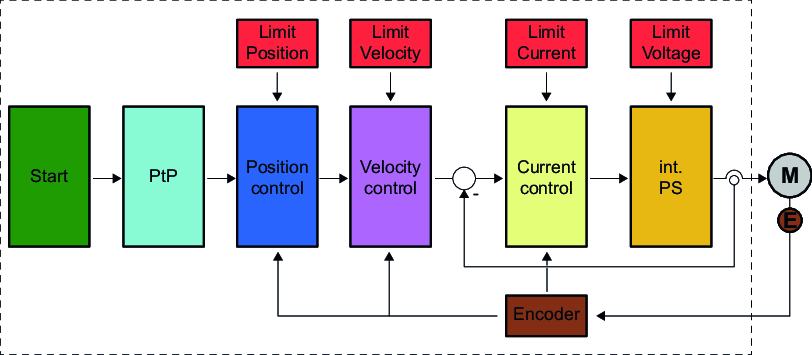
Synchronous positioning
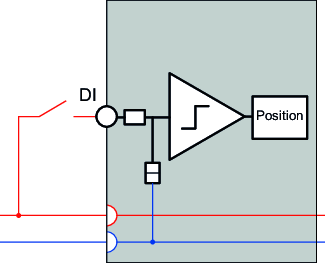
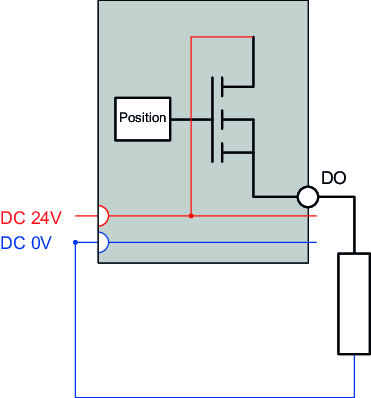
Using the DIOs
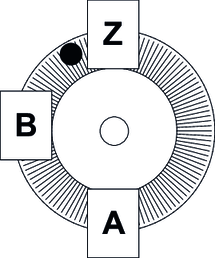
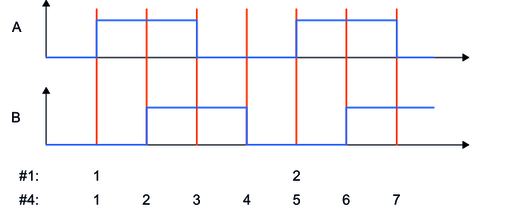
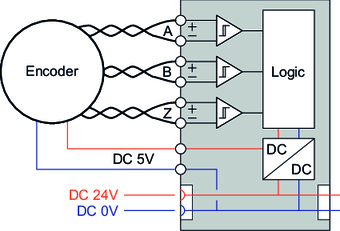
Using the encoder
Brake control
Input/output area
Acyclical channel
Scaling and units
Monitoring and error response
❮
❯
Format-Changing Drive System
Language
Deutsch
汉语
English
Us-English
Italiano
Brasileiro
Español
Türkçe
SEW-EURODRIVE
Home
Operation
OSS21C function module
Use