Encoder configurations
Depending on the setting for "0x8F00-01 – Encoder feedback configuration", the function module operates in open-loop or closed-loop mode. A distinction is made between the following encoder configurations:
The following motion profiles are available with device profile CiA 402:
- Reference travel (homing)
- Commutation detection
- PtP position profile
- Speed profile
- Torque control
- Synchronous positioning
Possible combinations
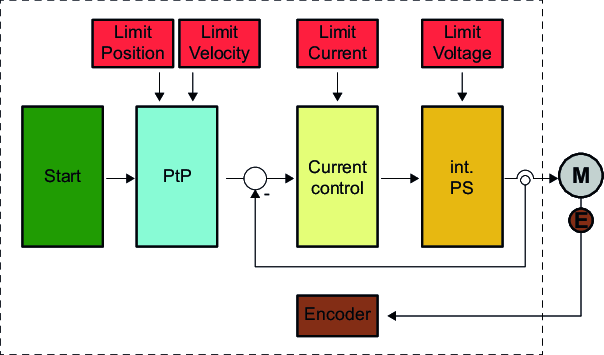
Open loop | PtP position profile (1), speed profile (3), homing (6), synchronous positioning (8) | |
|---|---|
"0x8F00-01 – Encoder feedback configuration" | 0: Open loop |
"0x8280-01 – Setpoint operating mode" | Operating mode: 1, 3, 6 or 8 |
"0x8480-02 – Actual position" | Position value of the profile generator. |
"0x8F00-02 – Actual encoder value" | 0 (fixed) |
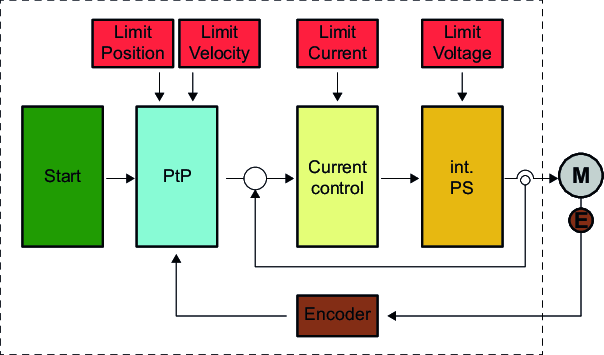
Open loop | PtP position profile (1), speed profile (3), homing (6), synchronous positioning (8) | |
|---|---|
"0x8F00-01 – Encoder feedback configuration" | 1: Open loop |
"0x8280-01 – Setpoint operating mode" | Operating mode: 1, 3, 6 or 8 |
"0x8480-02 – Actual position" | Position value of the profile generator. |
"0x8F00-02 – Actual encoder value" | Encoder value |
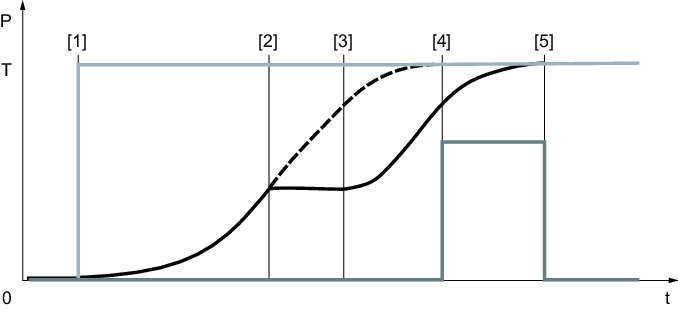
Pseudo closed loop | PtP position profile (1), homing (6) | |
|---|---|
"0x8F00-01 – Encoder feedback configuration" | 5: Pseudo closed loop |
"0x8280-01 – Setpoint operating mode" | Operating mode: 1 or 6 |
"0x8480-02 – Actual position" | Encoder value normalized to position. |
"0x8F00-02 – Actual encoder value" | Encoder value |
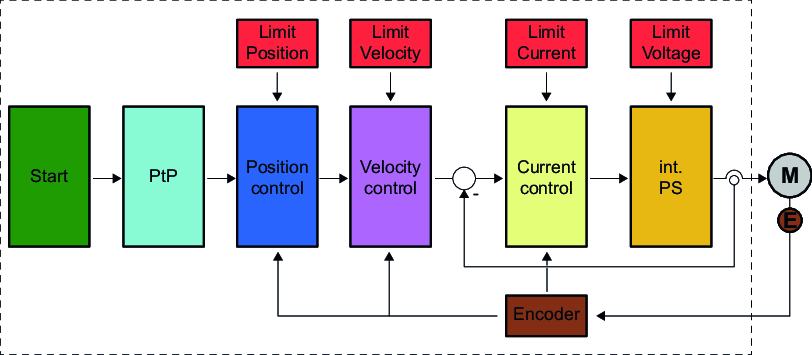
Closed loop | PtP position profile (1), speed profile (3), homing (6), synchronous positioning (8), torque control (10), commutation detection (15) | |
|---|---|
"0x8F00-01 – Encoder feedback configuration" | 3: Closed loop (FOC) |
"0x8280-01 – Setpoint operating mode" | Operating mode: 1, 3, 6, 8, 10 or 15 |
"0x8480-02 – Actual position" | Encoder value normalized to position. |
"0x8F00-02 – Actual encoder value" | Encoder value |