Open loop
- The function module operates in open-loop control mode.
- The encoder signal is not taken into account by the controller.
- The setpoint for the current controller is generated by the higher-level profile generator.
- The actual position corresponds to the position value of the profile generator.
- An encoder value is output depending on the setting in 0x8F00-01 – Encoder feedback configuration.
- 0: Encoder value is 0 (fixed).
- 1: Encoder value is output in 0x8F00-02 – Encoder – Actual value.
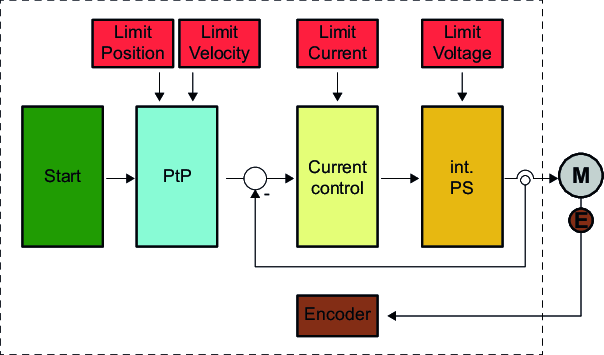
Start | Start parameter |
Limit Position | Position limiting |
Limit Voltage | Voltage limiting |
Current control | Current controller |
M | Motor |
Limit Velocity | Speed limitation |
Limit Current | Current limitation |
PtP | PtP position profile |
int. PS | Internal power stage |
Encoder | Actual encoder value |
Operating principle
In open loop mode, the setpoint for the current controller is generated by the higher-level profile generator. The position and speed control loops are not closed and therefore the encoder signal is not evaluated in the control loops. The following objects are used with open loop:
Open loop | Using the encoder | |
|---|---|
Open loop 0: Encoder value is 0 (fixed). 1: Encoder value is output in 0x8F00-02 – Encoder – Actual value. | |
Position value of the profile generator | |
Specification of setpoint position | |
The display is dependent on the setting in 0x8F00-01 – Encoder feedback configuration. | |
