Intégration du variateur de vitesse dans un réseau EtherCAT®
Dans cet exemple, l'architecture d'appareil suivante est utilisée.
- Système de pilotage amont (API) CX2020 de la société Beckhoff Automation GmbH avec extension EtherCAT® EK1110
- Variateur d'application MOVIDRIVE® modular, module double-axes MDD90A (CiA402 : MDDA90ACiA402)
- Variateur d'application MOVIDRIVE® modular, module monoaxe MDA90A avec carte de sécurité MOVISAFE® CSS21A (CiA402 : MDA90ACiA402)
L'illustration suivante représente schématiquement l'architecture de l'appareil.
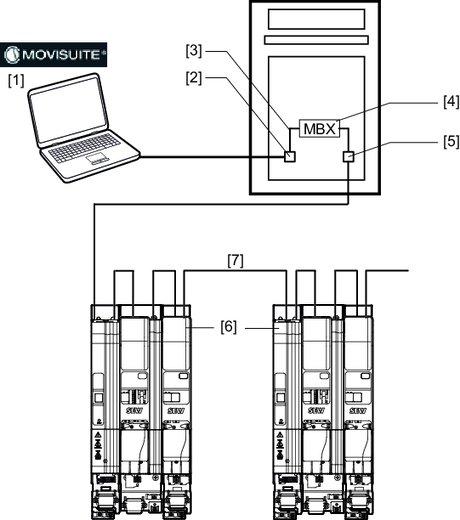
[1] | PC d'ingénierie avec MOVISUITE® | [5] | Interface EtherCAT® du maître EtherCAT® |
[2] | Interface d'ingénierie du maître EtherCAT® | [6] | Variateur de vitesse SEW |
[3] | Routage IP interne | [7] | Interface EtherCAT®/SBusPLUS des variateurs de vitesse |
[4] | Passerelle de messagerie MBX |
|
|
Les outils suivants sont utilisés pour la configuration et la mise en service des appareils.
- TwinCAT 3 de la société Beckhoff Automation GmbH pour les API
- MOVISUITE® pour les variateurs de vitesse SEW
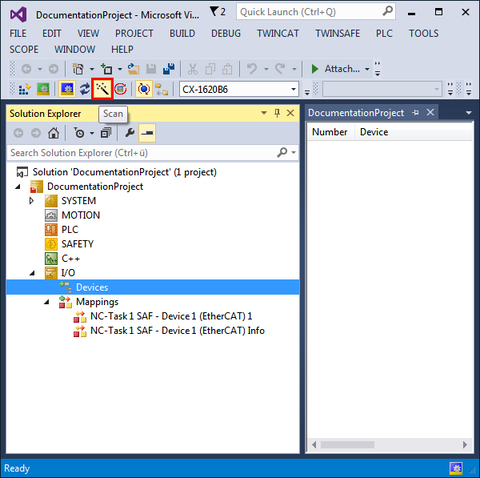
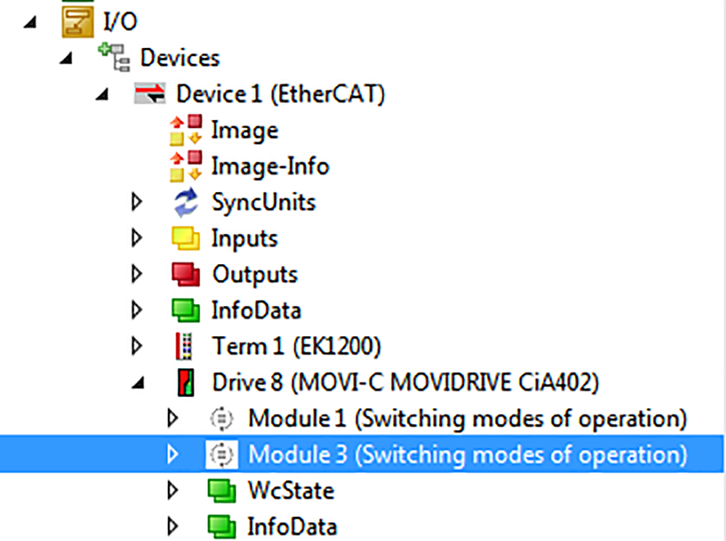
Le variateur de vitesse doit être créé dans la configuration E/S du maître EtherCAT®.
Informations complémentaires
- EtherCAT® : intégration des variateurs de vitesse par scrutation réseau
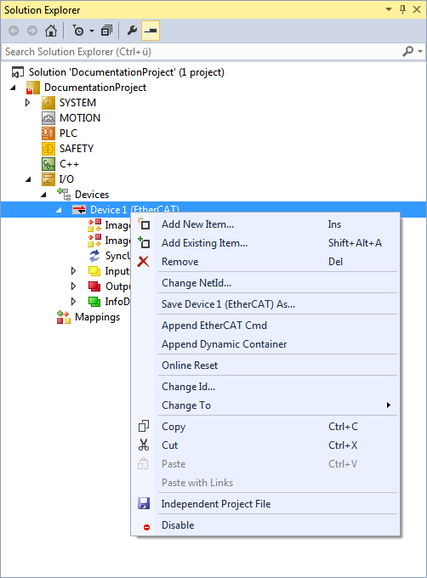
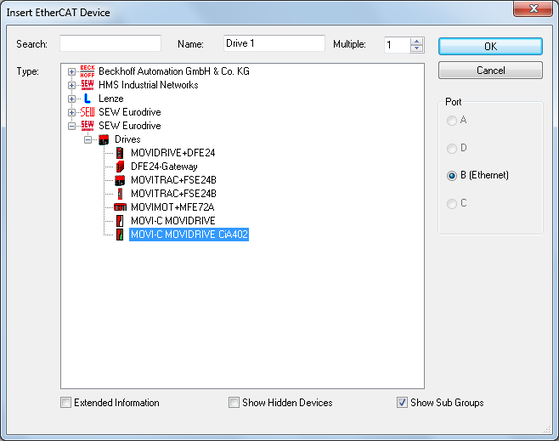
- EtherCAT® : intégration de variateurs de vitesse en mode Offline
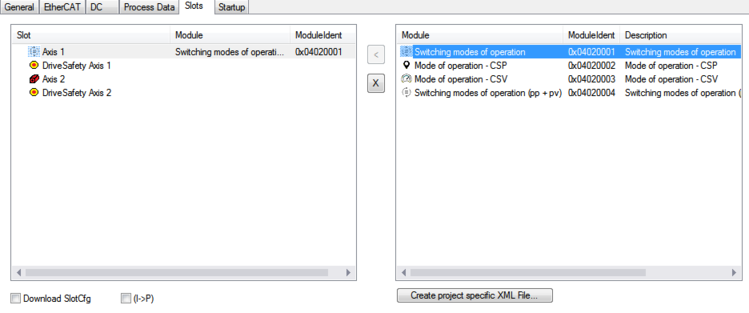
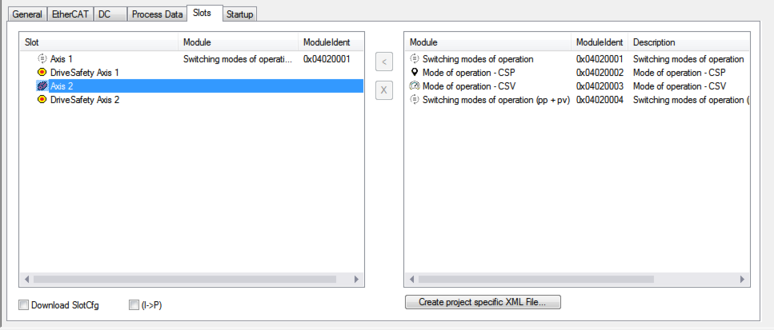
- EtherCAT® : adaptation de la configuration de l'emplacement, ajout du module double-axes
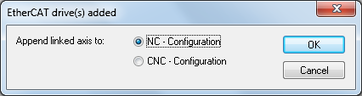
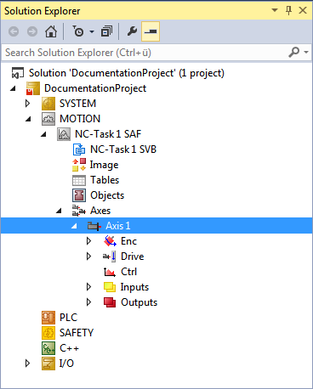
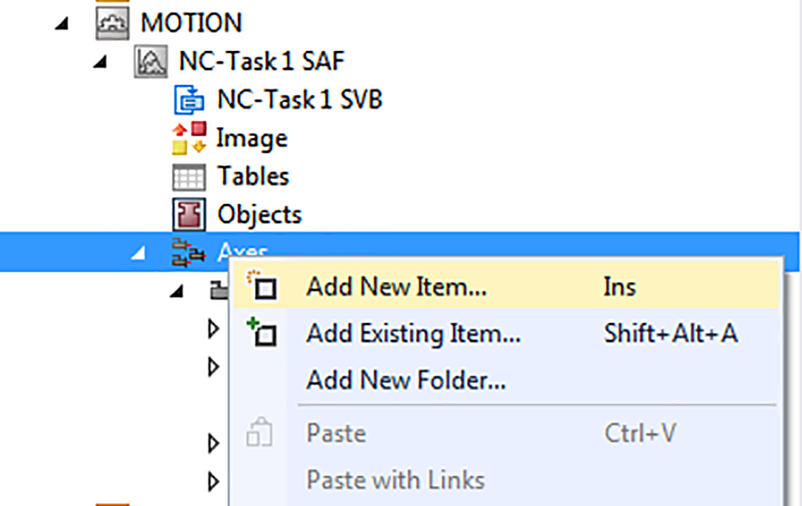
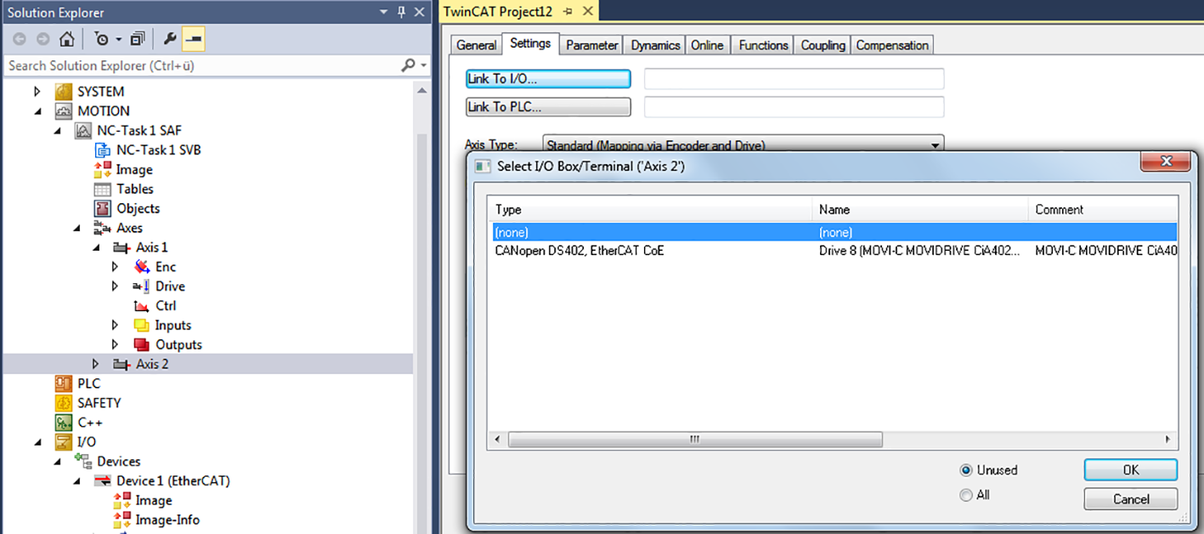
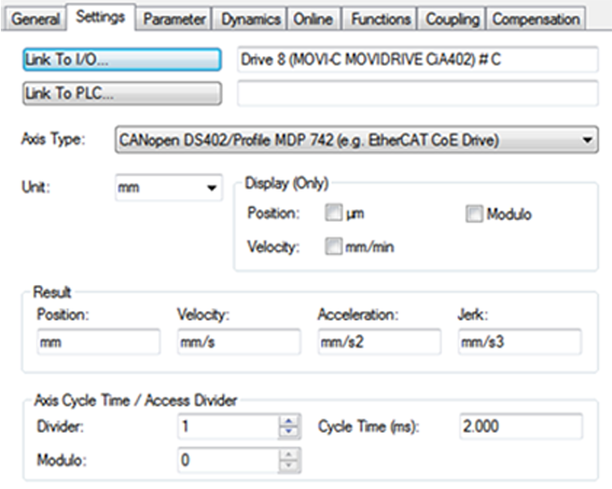
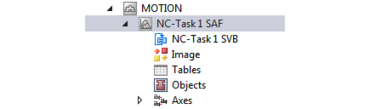
- Axe Motion : intégration du variateur de vitesse
- Axe Motion : connexion d'un module double-axes
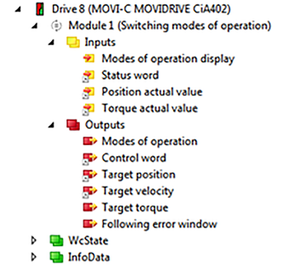
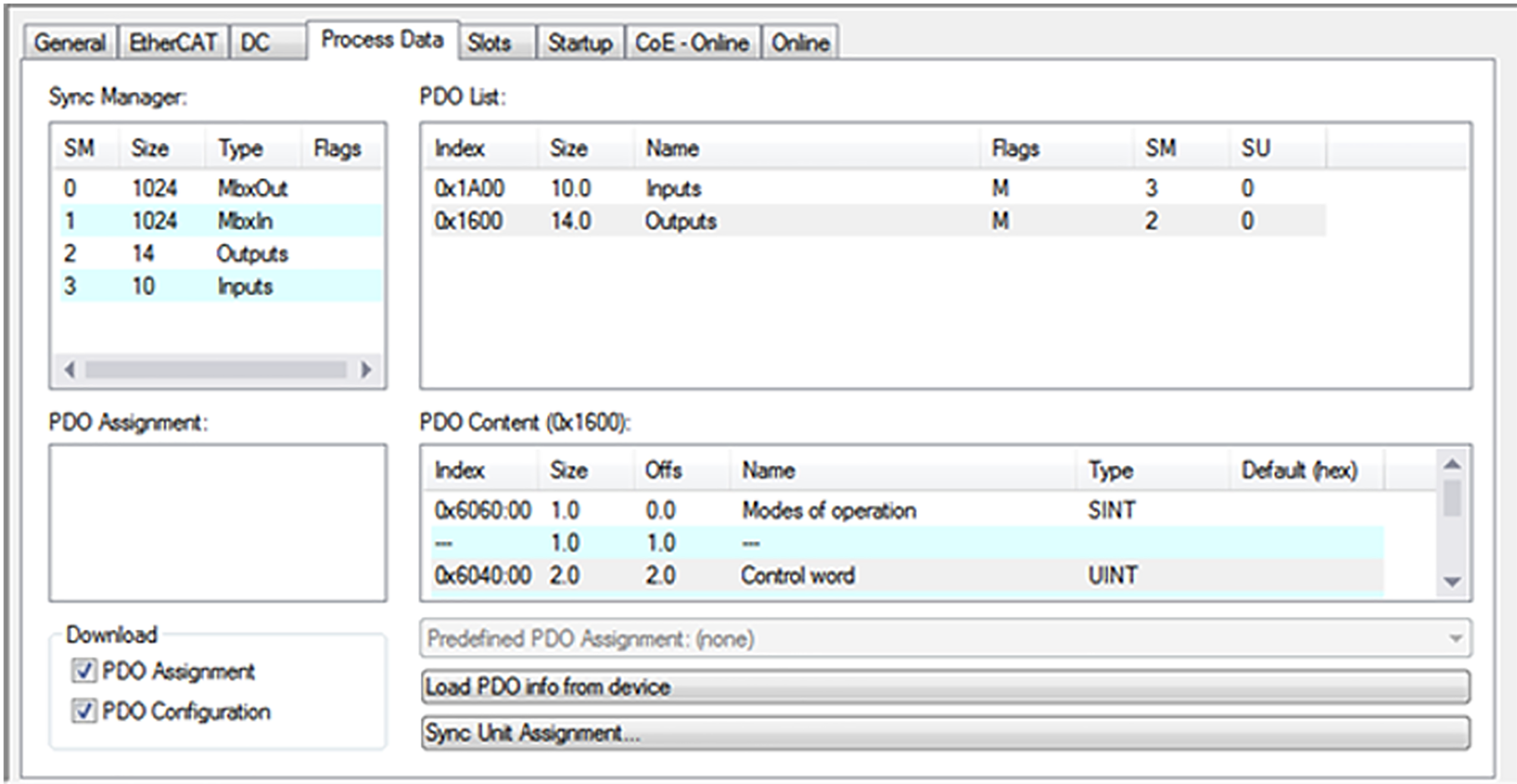
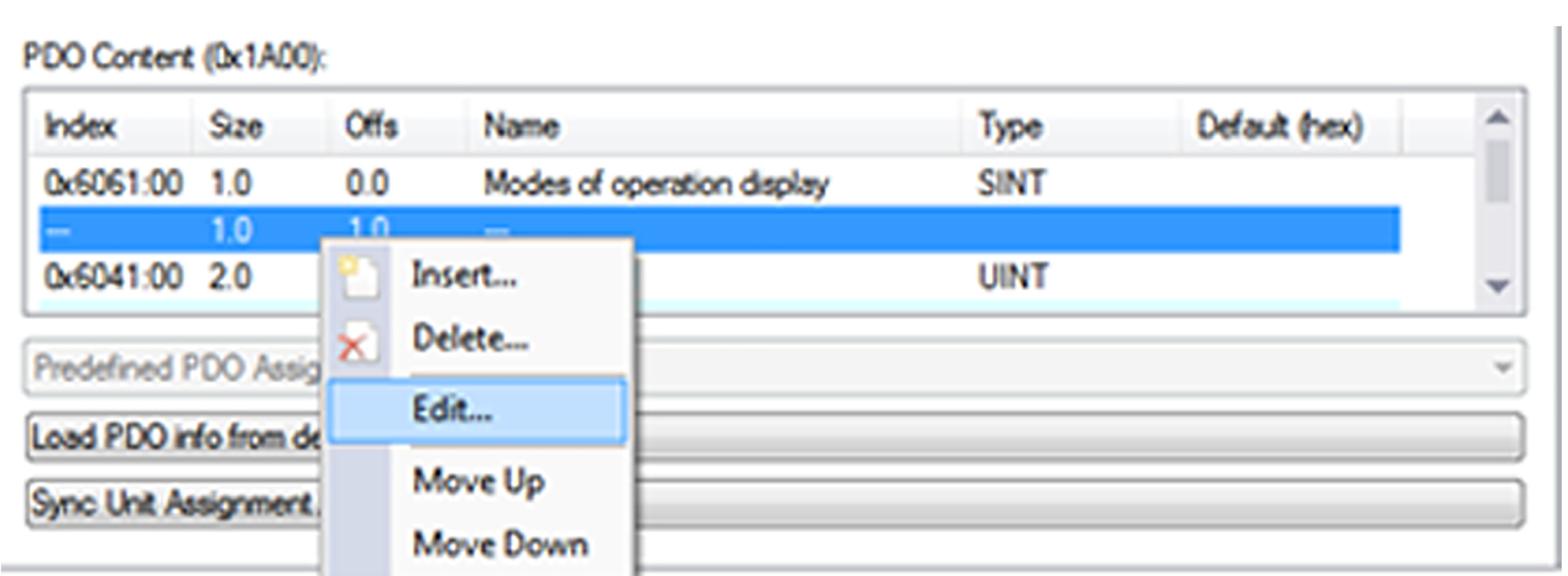
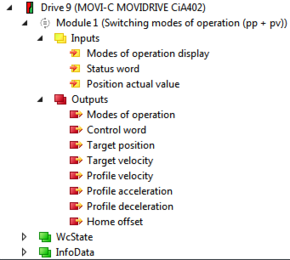
- Adaptation de la représentation PDO
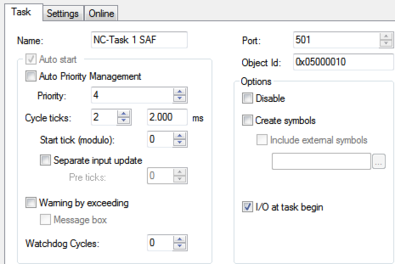
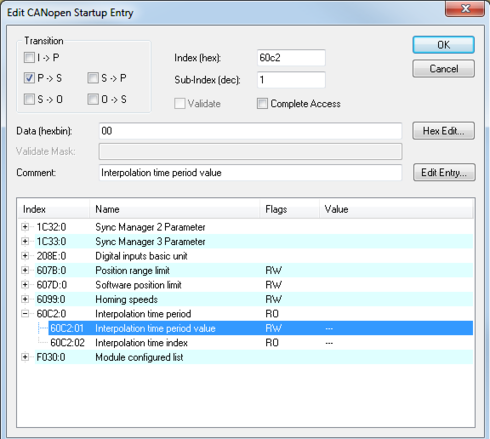
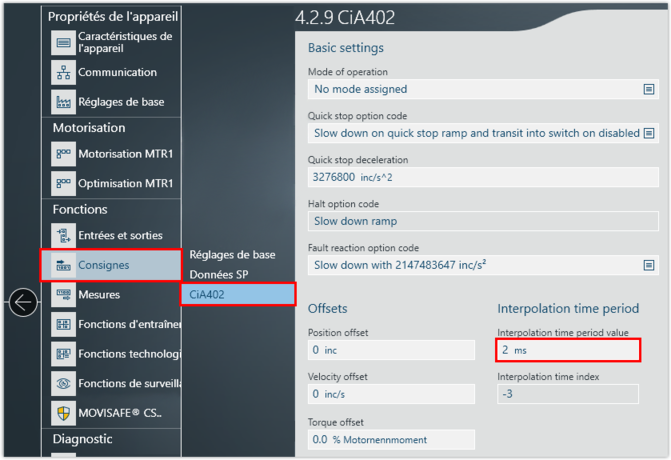
- Réglage de la durée d'interpolation
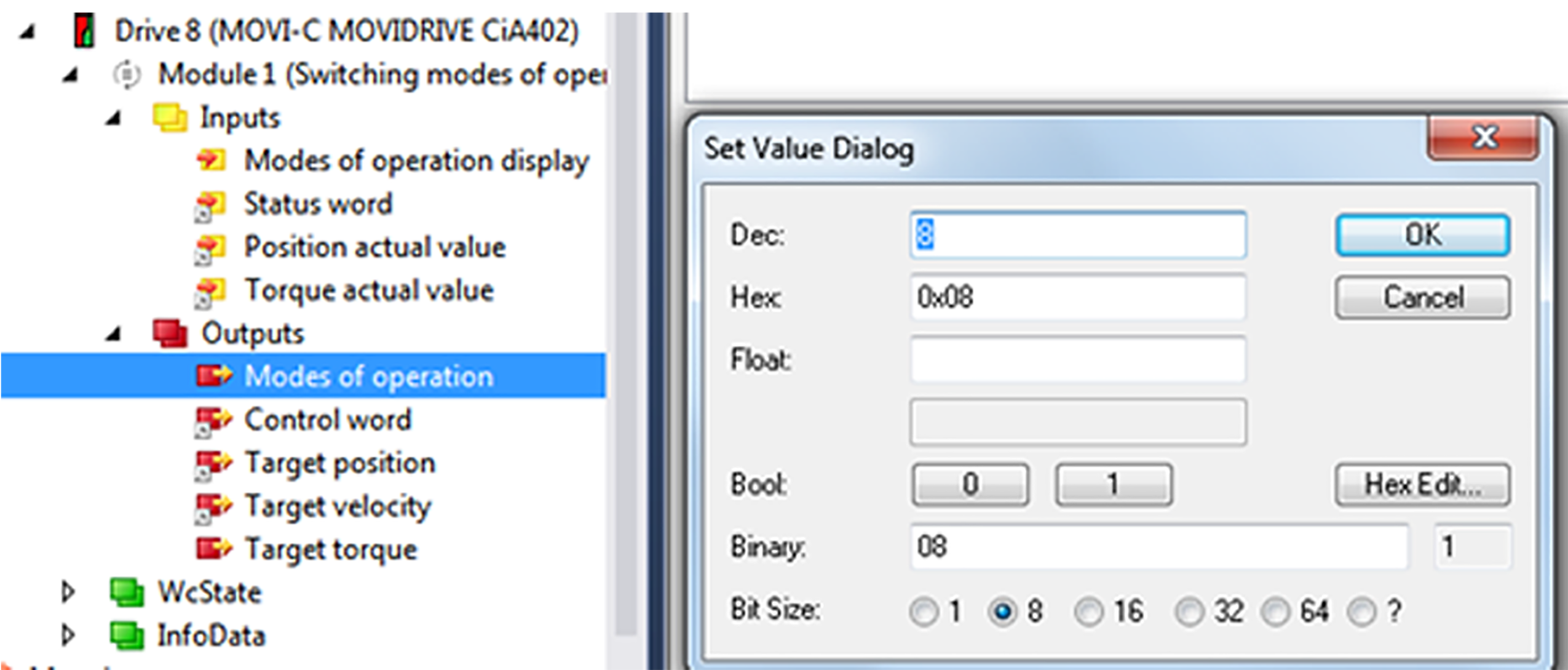
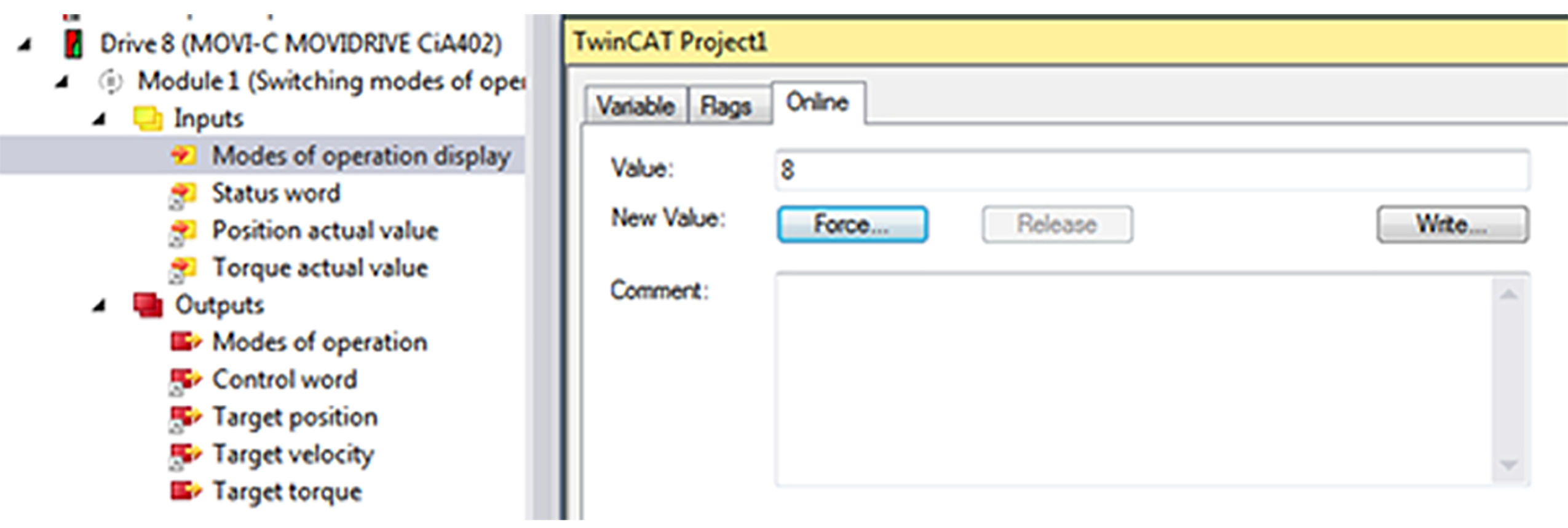
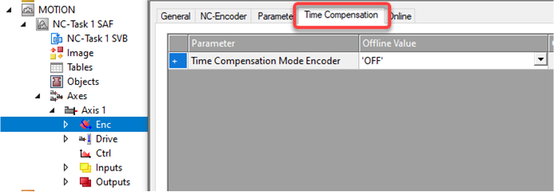
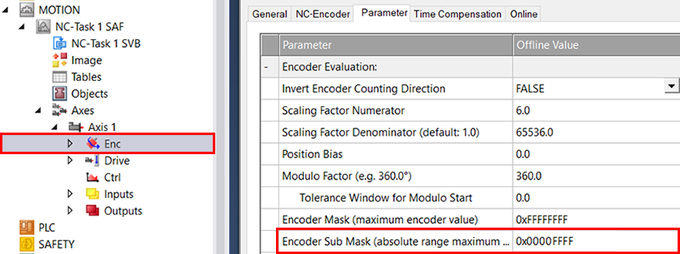
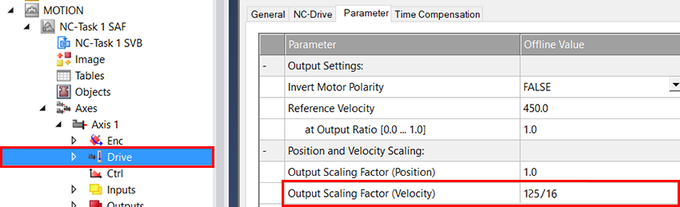
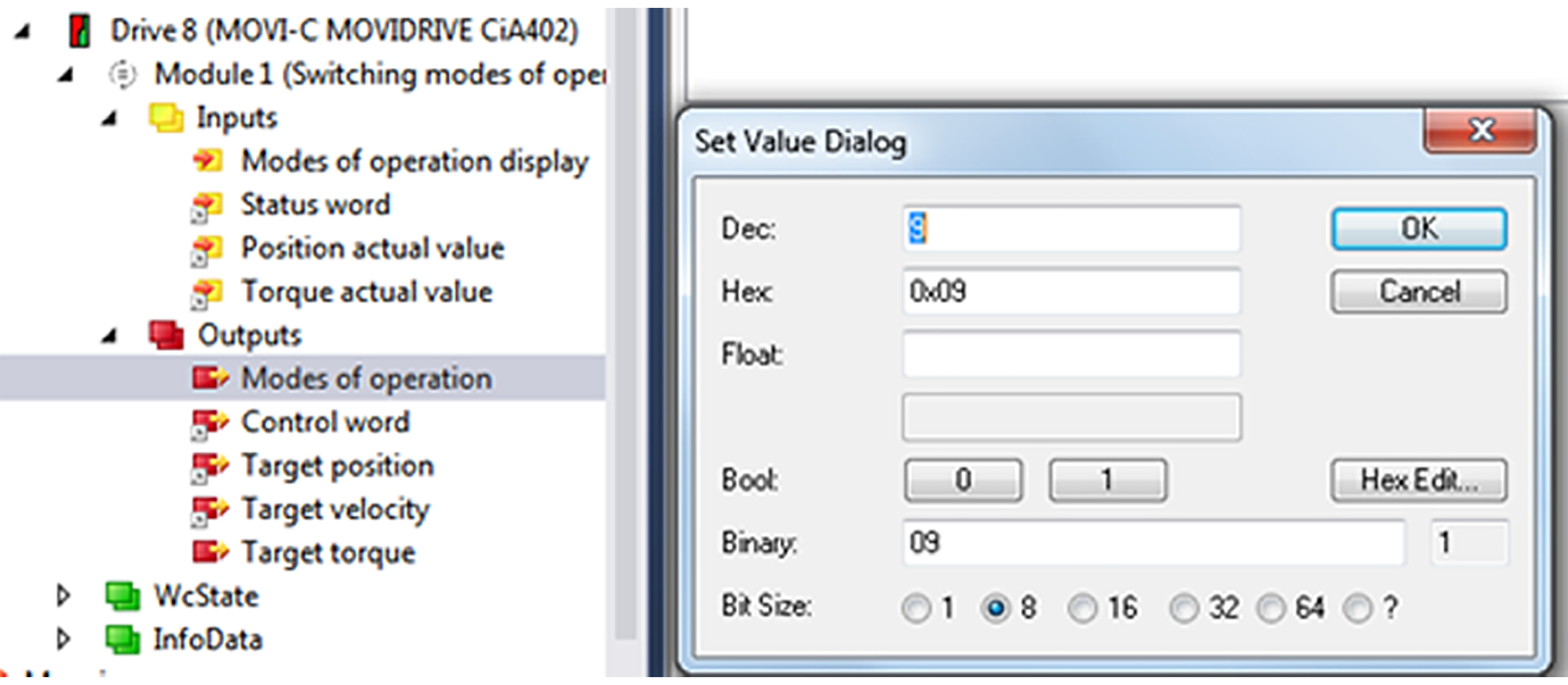
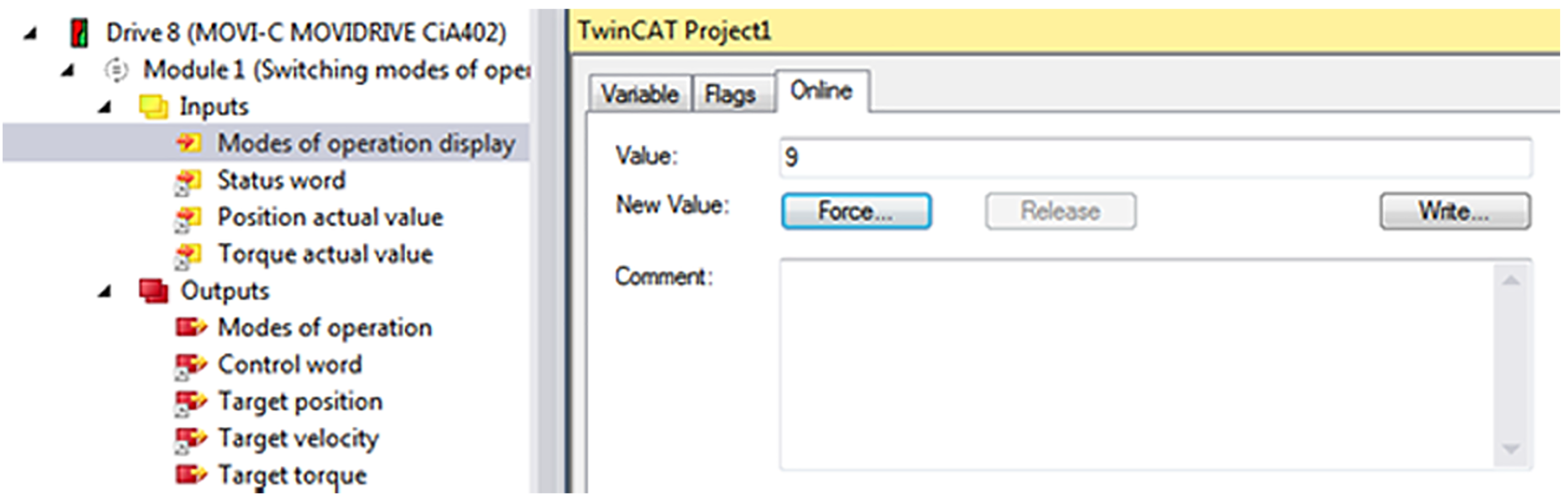
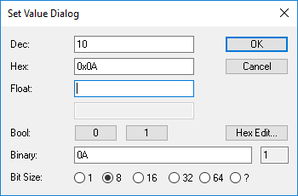
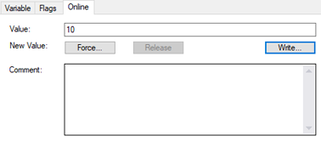
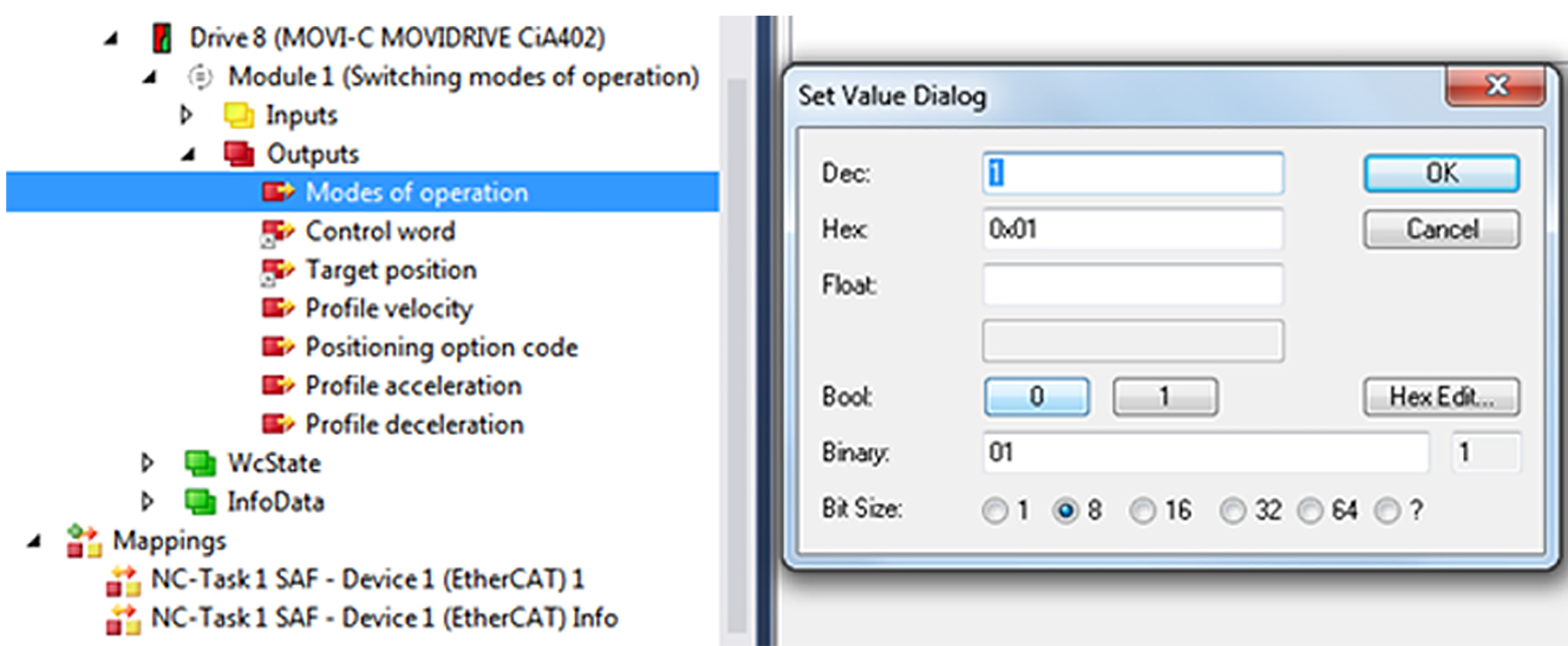
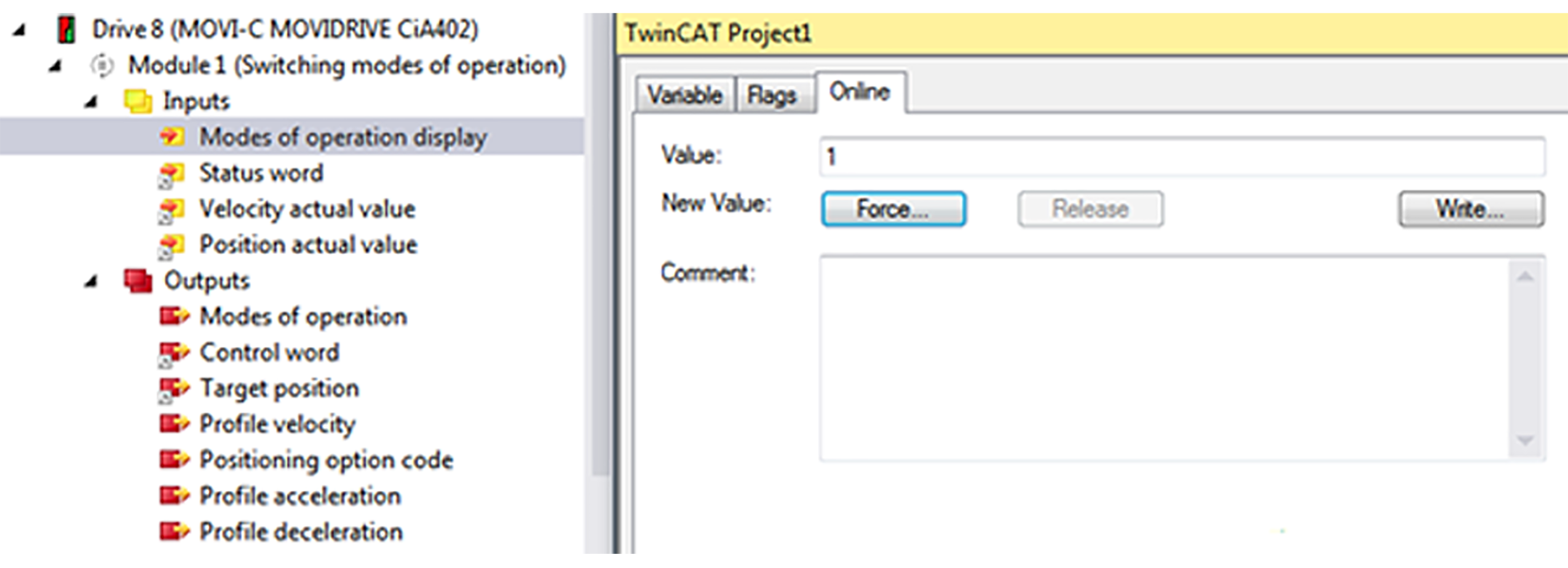
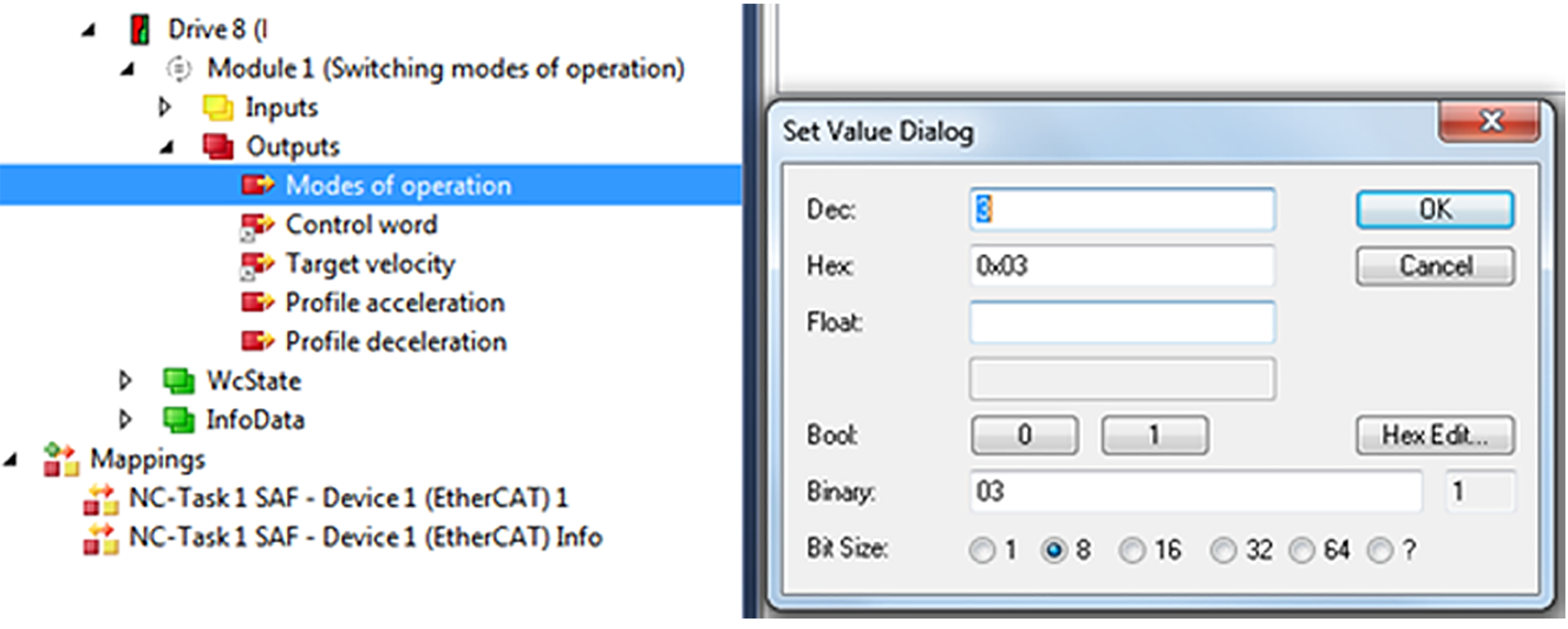
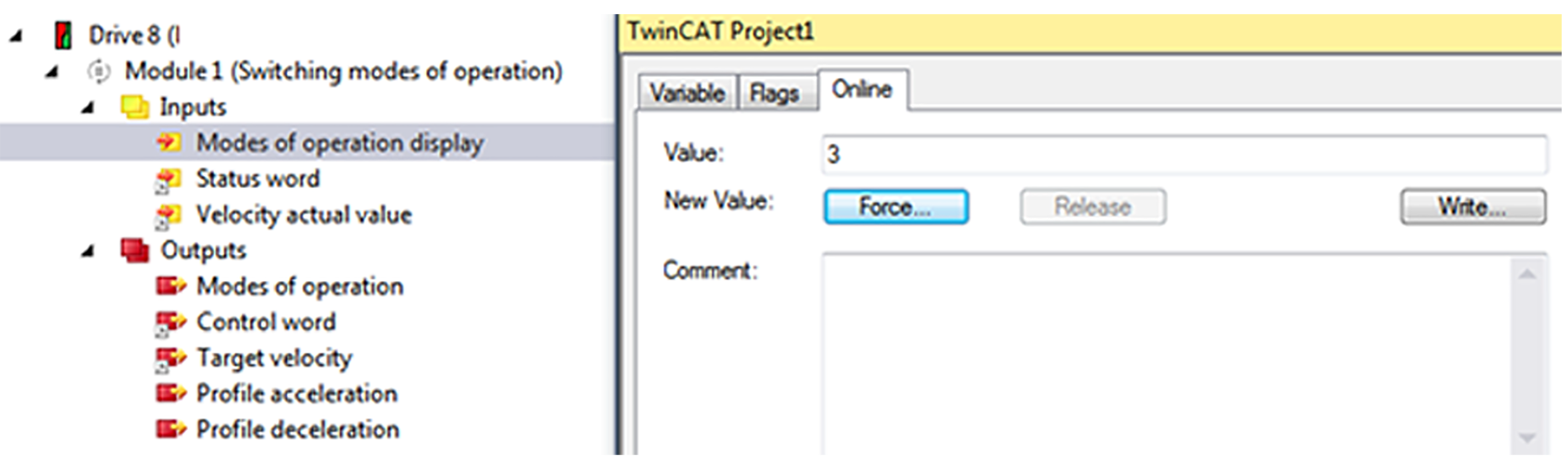
- Réglage du Mode of operation "Cyclic Synchronous Position" (csp)
- Réglage du Mode of operation "Cyclic Synchronous Velocity" (csv)
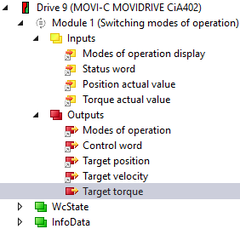
- Réglage du Mode of operation "Cyclic Synchronous Torque" (cst)
- Réglage du Mode of operation "Profile Position" (pp)
- Réglage du Mode of operation "Profile Velocity" (pv)
- Utilisation du Mode of operation "Homing" (hm)