Integração do conversor em uma rede EtherCAT®
No exemplo é usada a topologia da unidade a seguir:
- Controlador de nível superior (CLP) CX2020 da Beckhoff Automation GmbH com extensão EtherCAT® EK1110
- Conversor de aplicação MOVIDRIVE® modular, módulo de eixo duplo MDD90A (CiA402: MDDA90ACiA402)
- Conversor de aplicação MOVIDRIVE® modular, módulo de eixo único MDA90A com placa de segurança MOVISAFE® CSS21A (CiA402: MDA90ACiA402)
A figura a seguir é uma representação esquemática da topologia da unidade:
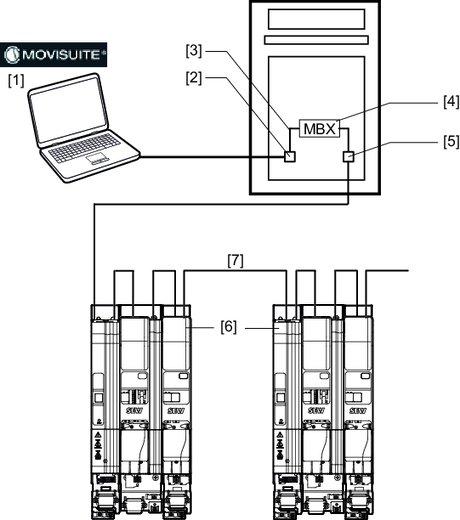
[1] | PC de engenharia com MOVISUITE® | [5] | Interface EtherCAT® do mestre EtherCAT® |
[2] | Interface de engenharia do mestre EtherCAT® | [6] | Conversor da SEW-EURODRIVE |
[3] | Roteamento de IP interno | [7] | Interface EtherCAT®/SBusPLUS do conversor |
[4] | Mailbox-Gateway MBX |
|
|
As ferramentas a seguir são utilizadas para configurar e colocar em operação as unidades:
- TwinCAT 3 da Beckhoff Automation GmbH para o CLP
- MOVISUITE® para os conversores da SEW‑EURODRIVE
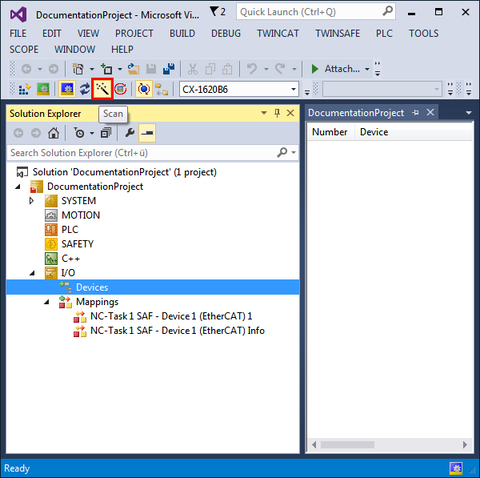
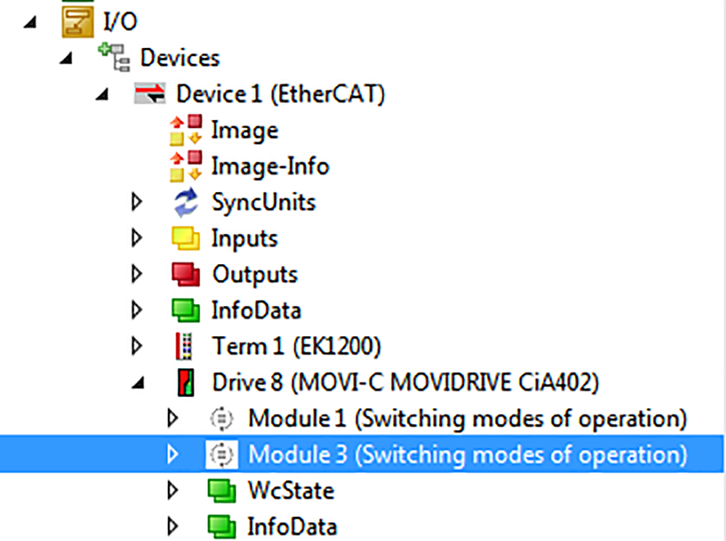
O conversor deve ser criado na configuração I/O do mestre EtherCAT®.
Informações adicionais
- EtherCAT®: Integrar o conversor através da varredura de rede
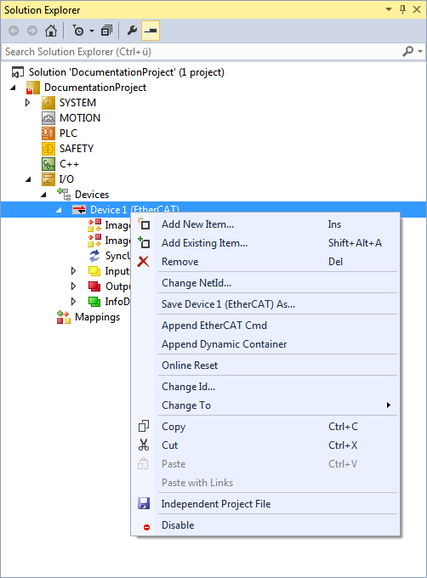
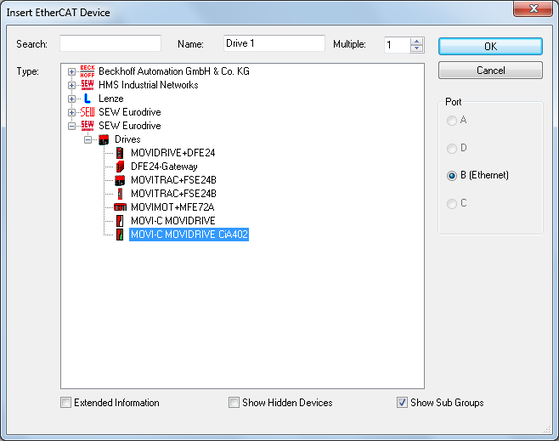
- EtherCAT®: Integrar conversor off-line
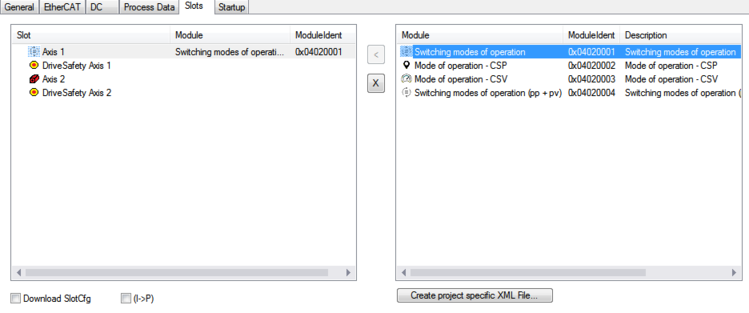
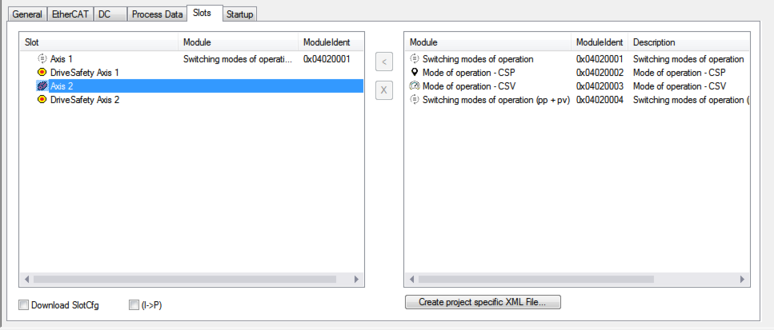
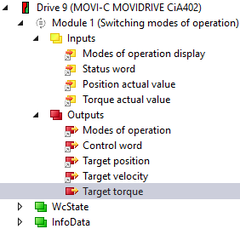
- EtherCAT®: adaptar a configuração de slot, adicionar o módulo de eixo duplo
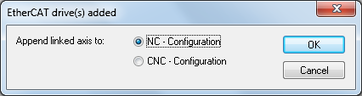
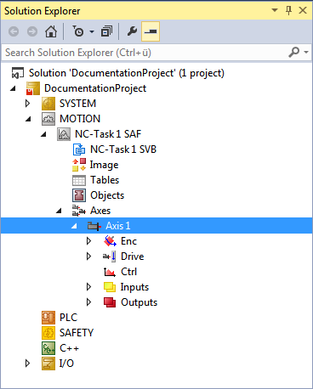
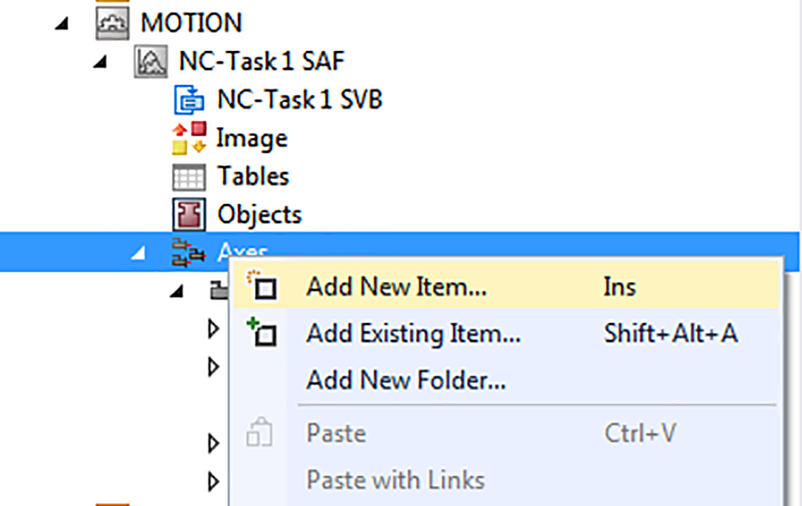
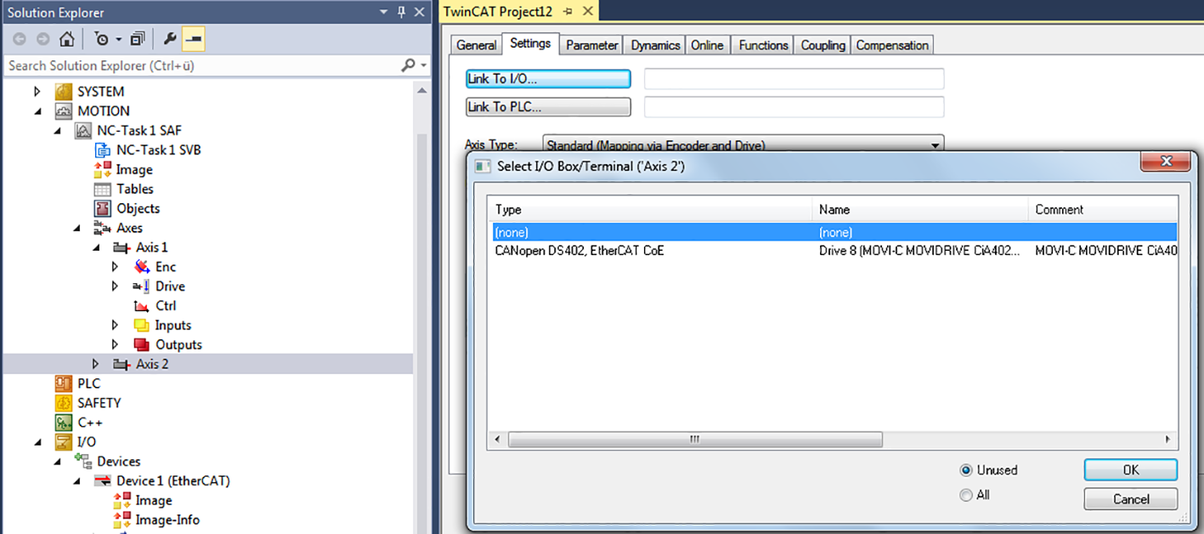
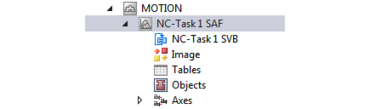
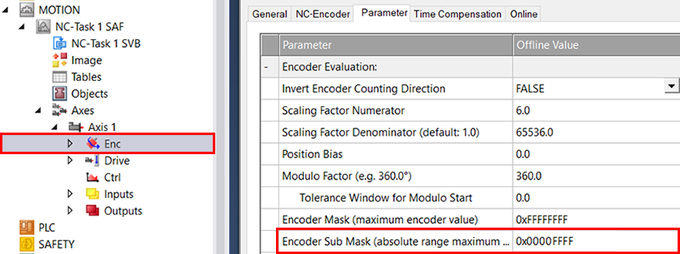
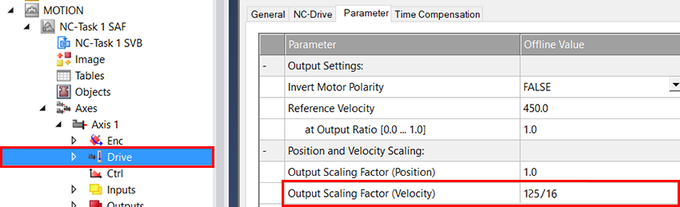
- Motion Axis: integrar conversor
- Motion Axis: conectar o módulo de eixo duplo
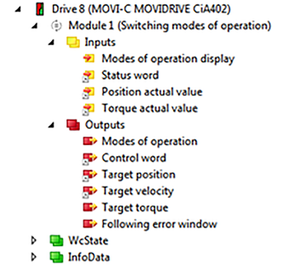
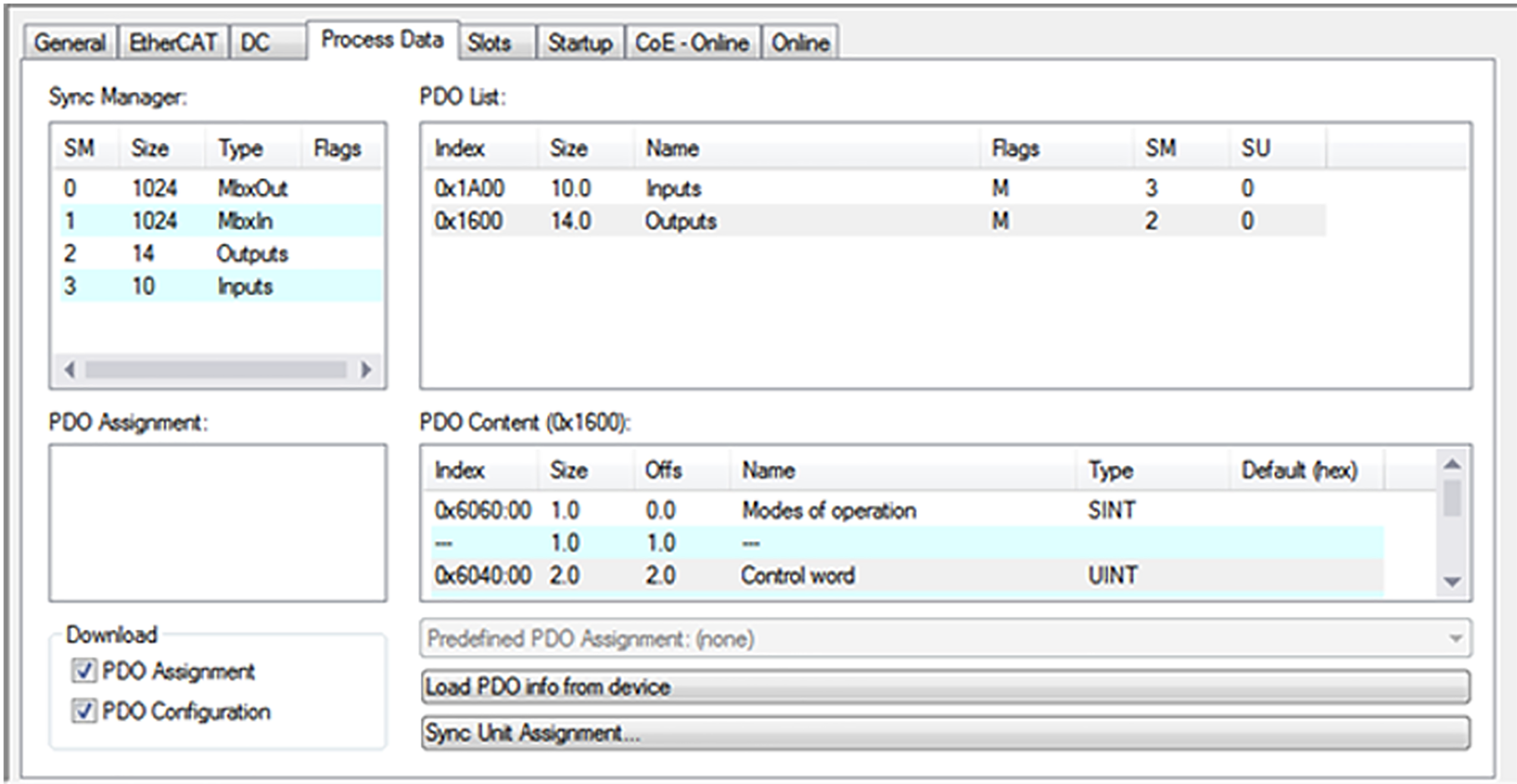
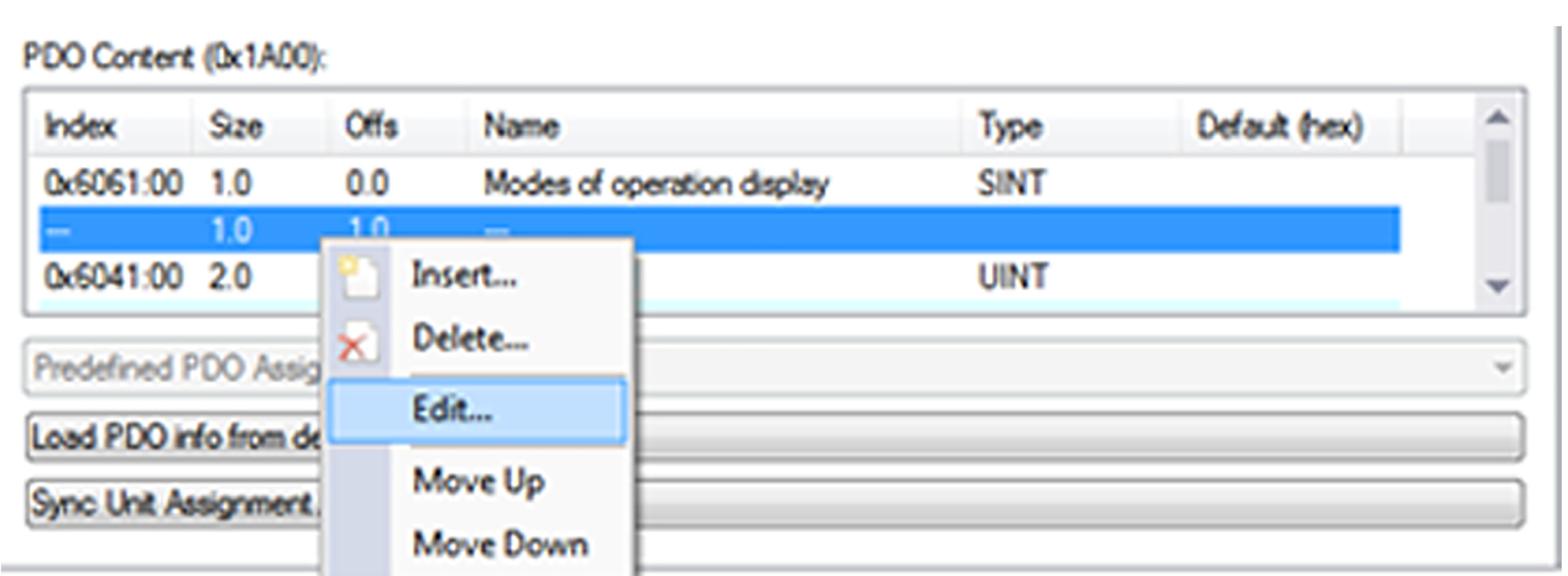
- Ajustar imagem PDO
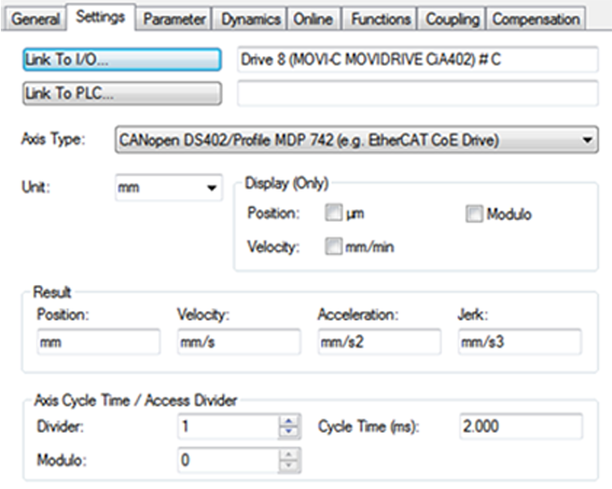
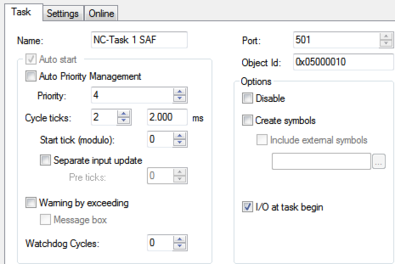
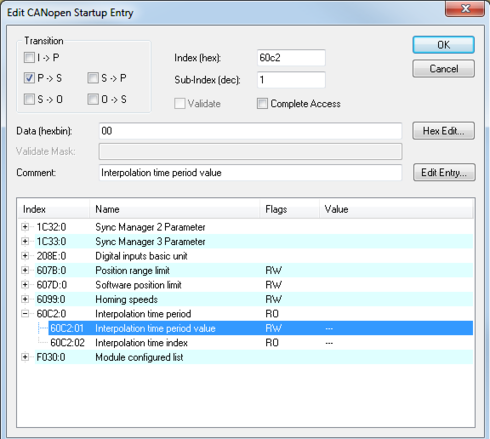
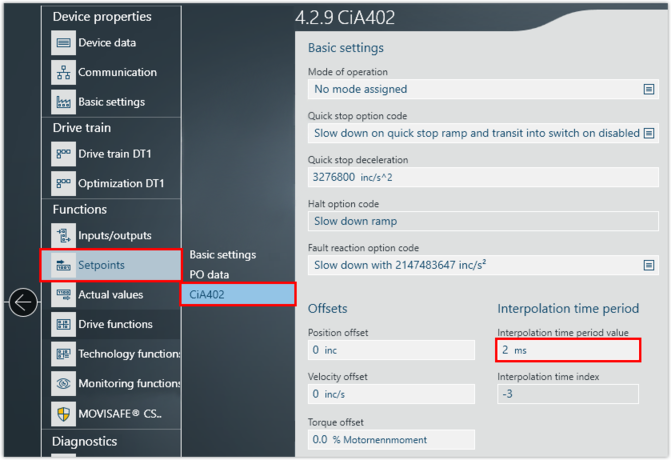
- Ajustar tempo de interpolação
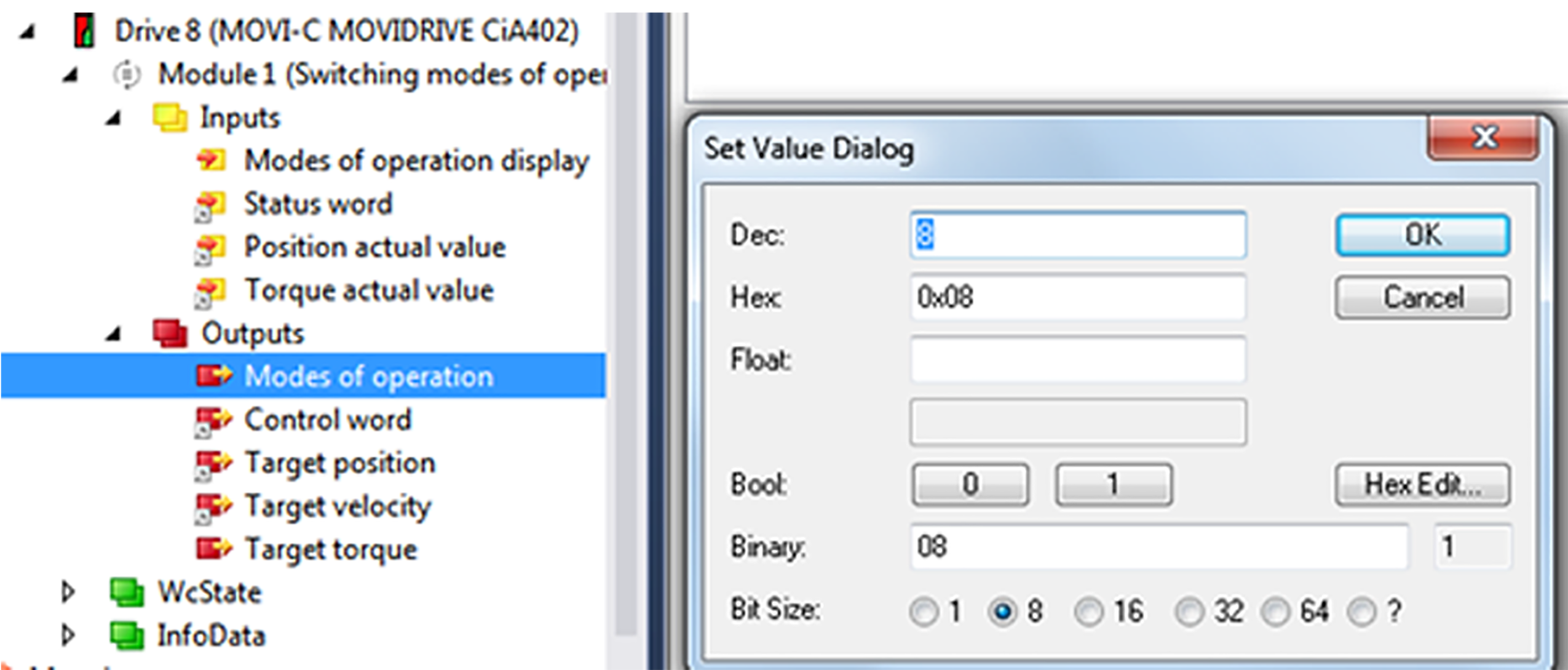
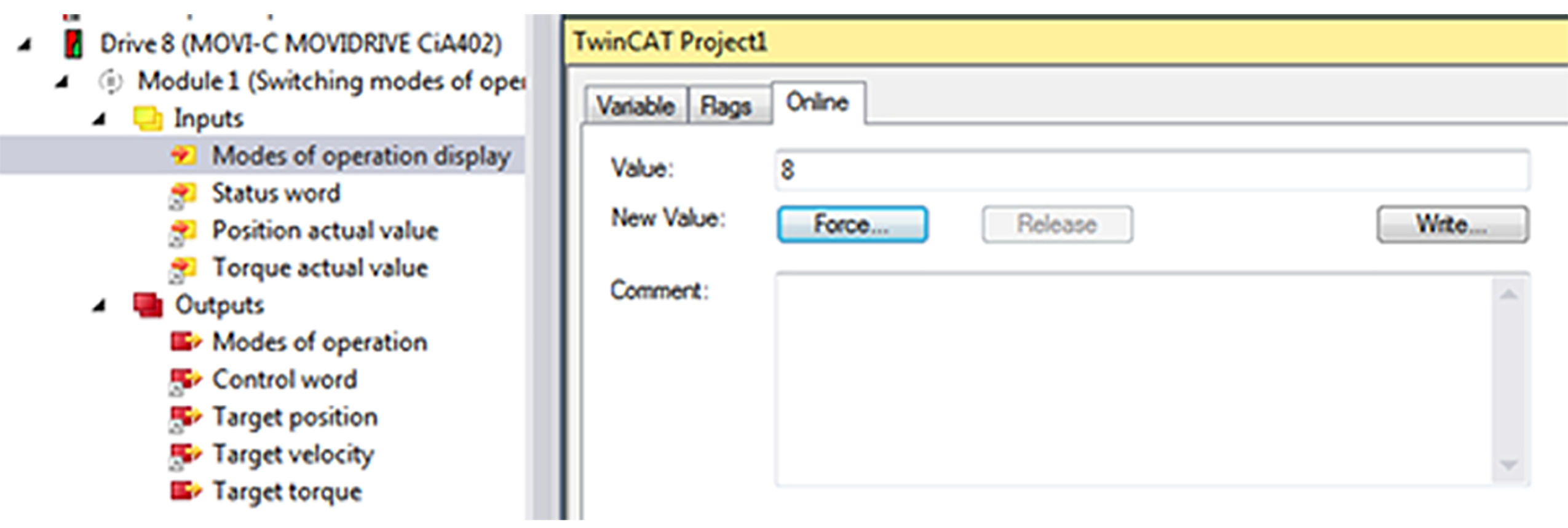
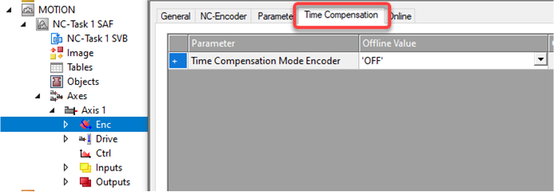
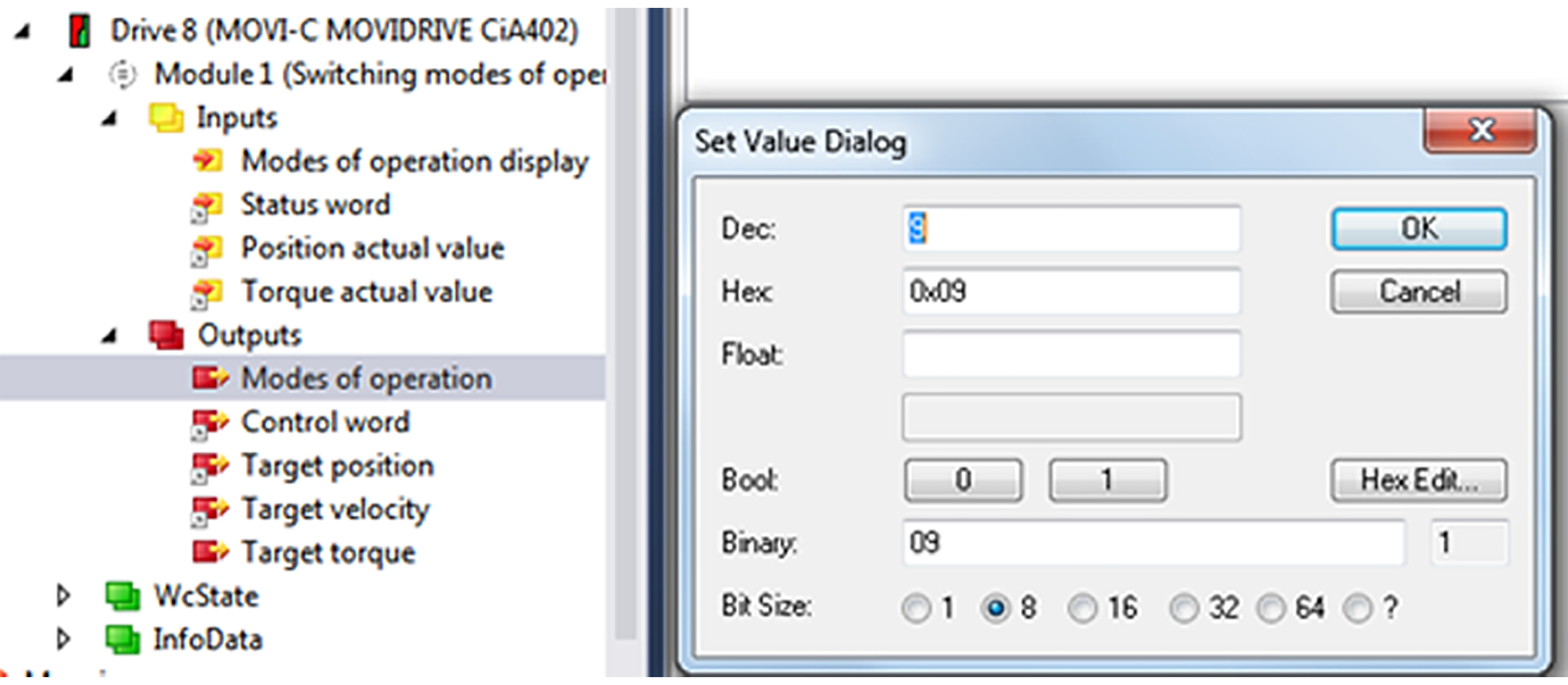
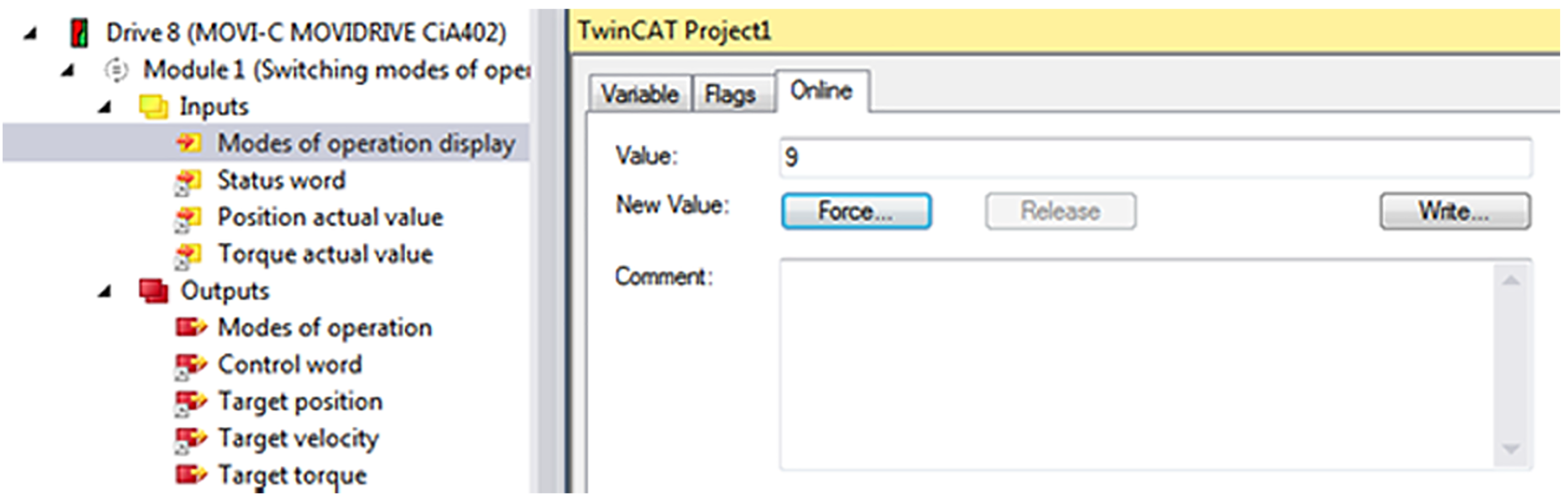
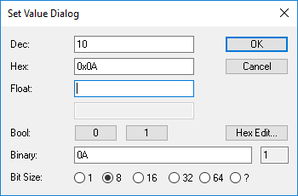
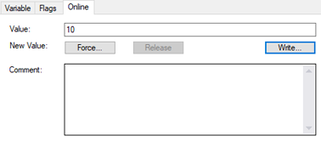
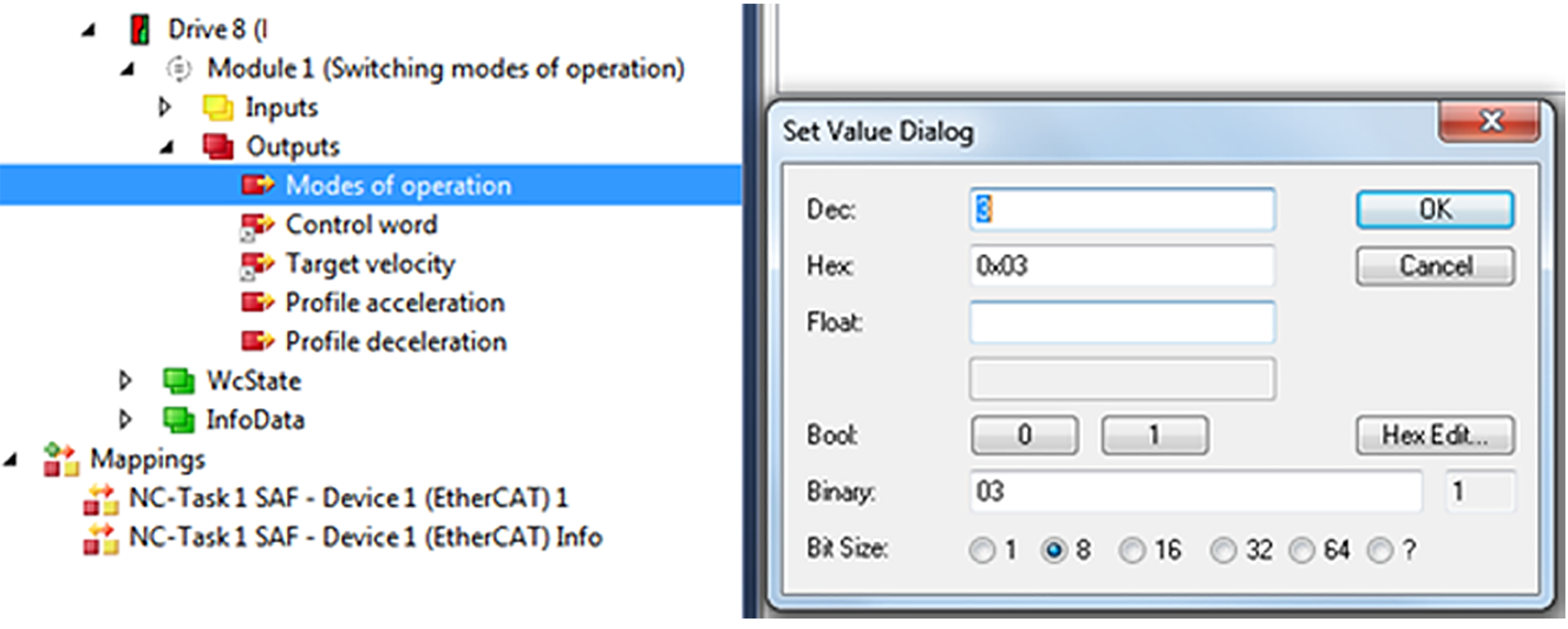
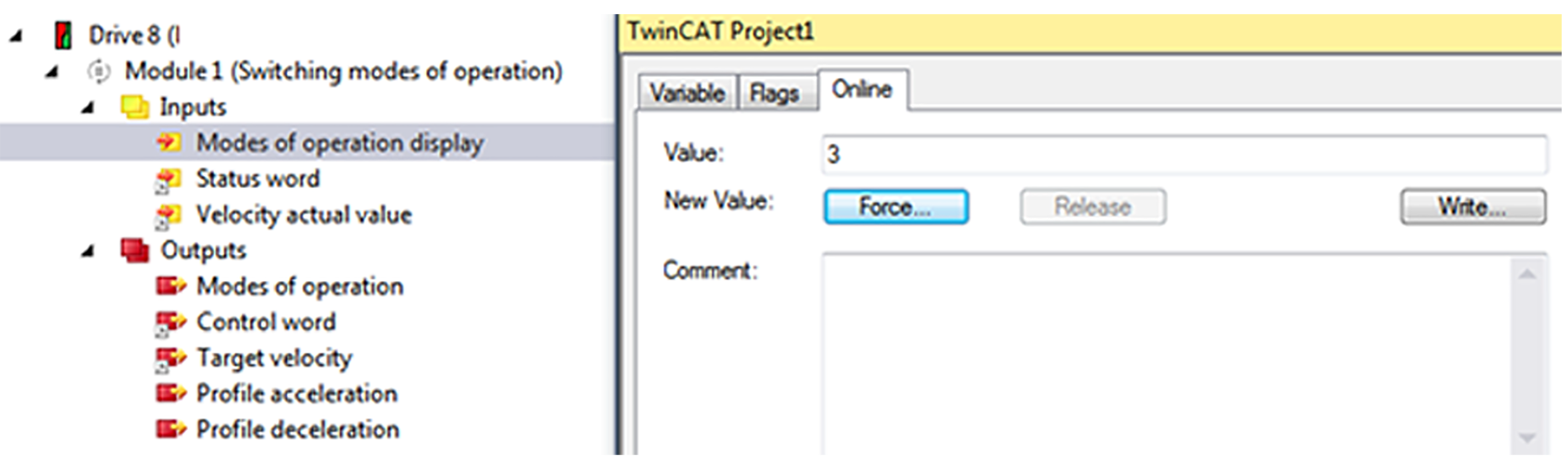
- Ajustar o modo de operação "Cyclic Synchronous Position" (csp)
- Ajustar o modo de operação "Cyclic Synchronous Velocity" (csv)
- Ajustar o modo de operação "Cyclic Synchronous Torque" (cst)
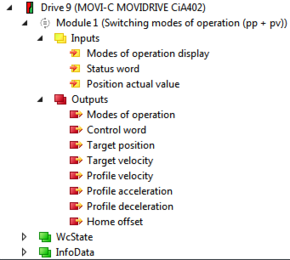
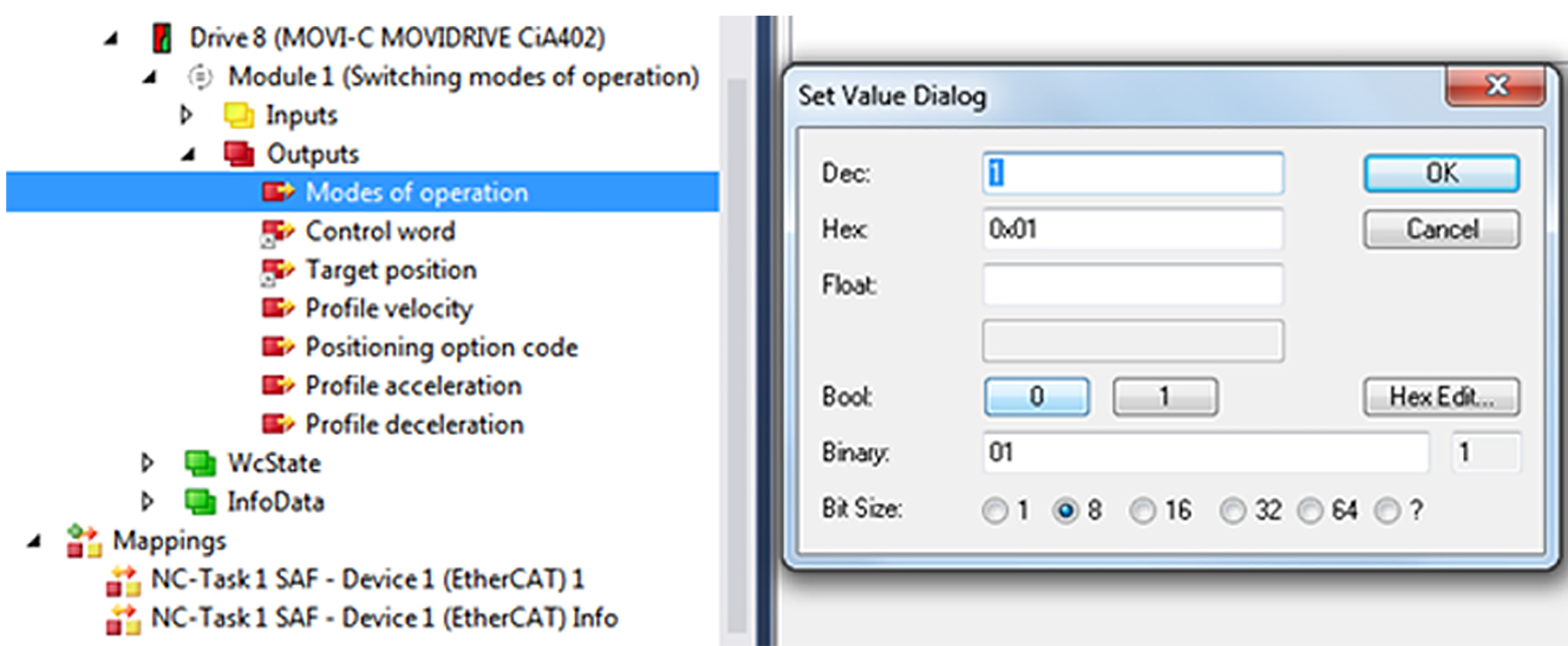
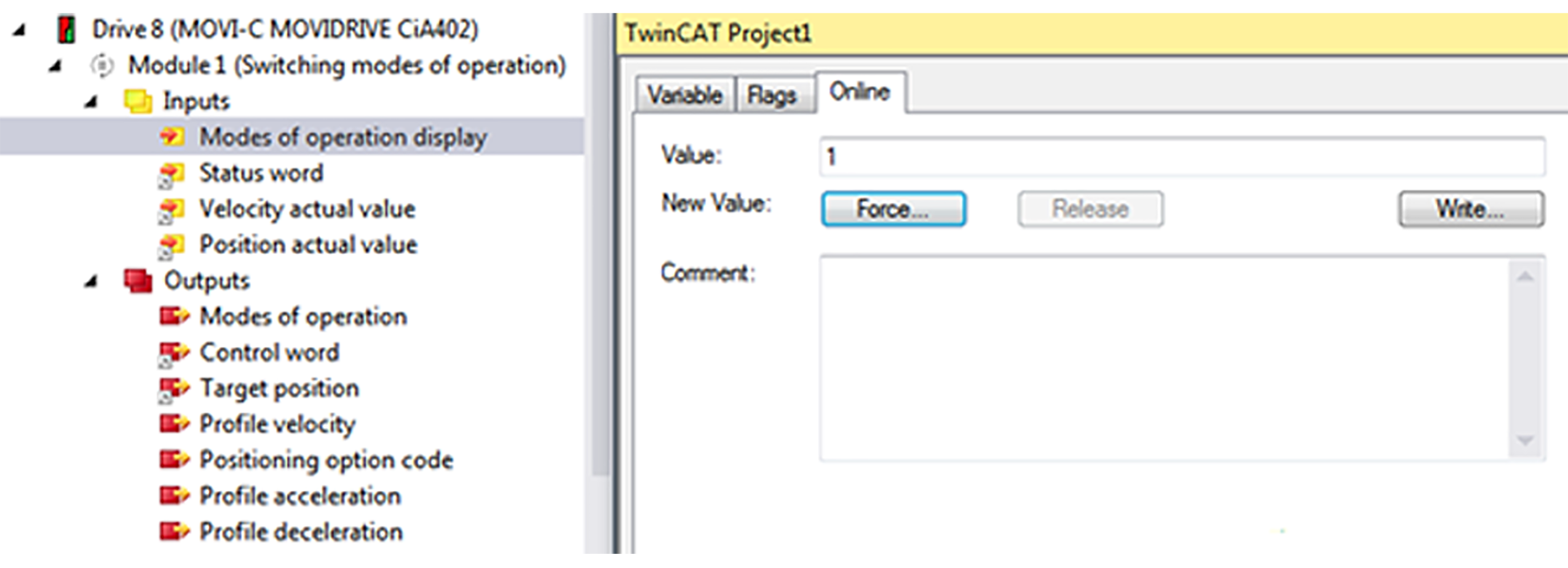
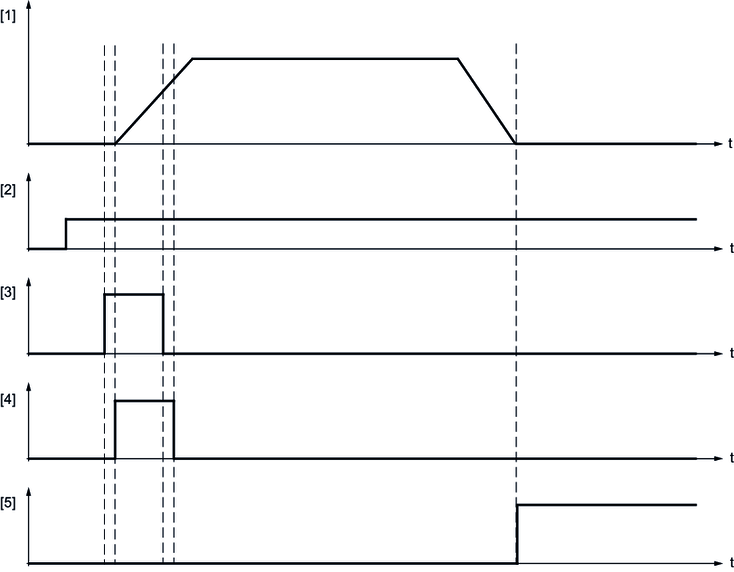
- Ajustar o modo de operação "Profile Position" (pp)
- Ajustar o modo de operação "Profile Velocity" (pv)
- Usar o modo de operação "Homing" (hm)