Integración del variador en una red EtherCAT®
En el ejemplo se utiliza la siguiente topología de unidades:
- Control (PLC) CX2020 de nivel superior de la empresa Beckhoff Automation GmbH con ampliación EtherCAT® EK1110
- Convertidor de aplicación MOVIDRIVE® modular, módulo de eje doble MDD90A (CiA402: MDDA90ACiA402)
- Convertidor de aplicación MOVIDRIVE® modular, módulo de un eje MDA90A con tarjeta de seguridad MOVISAFE® CSS21A (CiA402: MDA90ACiA402)
La siguiente imagen es una representación esquemática de la topología de unidades:
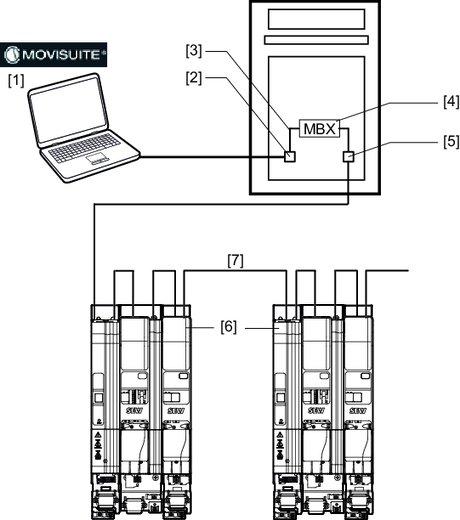
[1] | PC de ingeniería con MOVISUITE® | [5] | Interfaz EtherCAT® del maestro EtherCAT® |
[2] | Interfaz de ingeniería del maestro EtherCAT® | [6] | Variador de SEW‑EURODRIVE |
[3] | Enrutado IP interno | [7] | Interfaz EtherCAT®/SBusPLUS de los variadores |
[4] | Pasarela de buzón MBX |
|
|
Para la configuración y la puesta en marcha de las unidades se utilizan las siguientes herramientas:
- TwinCAT 3 de la empresa Beckhoff Automation GmbH para el PLC
- MOVISUITE® para los variadores de SEW‑EURODRIVE
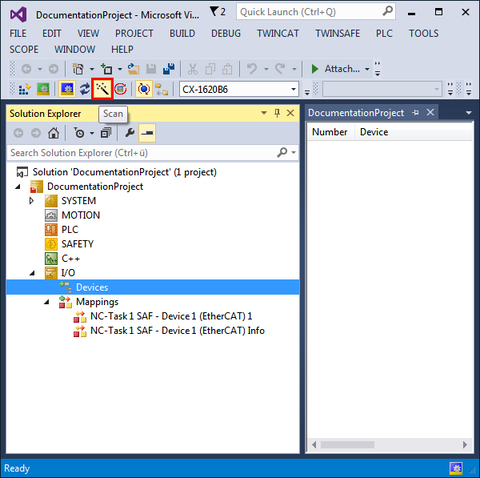
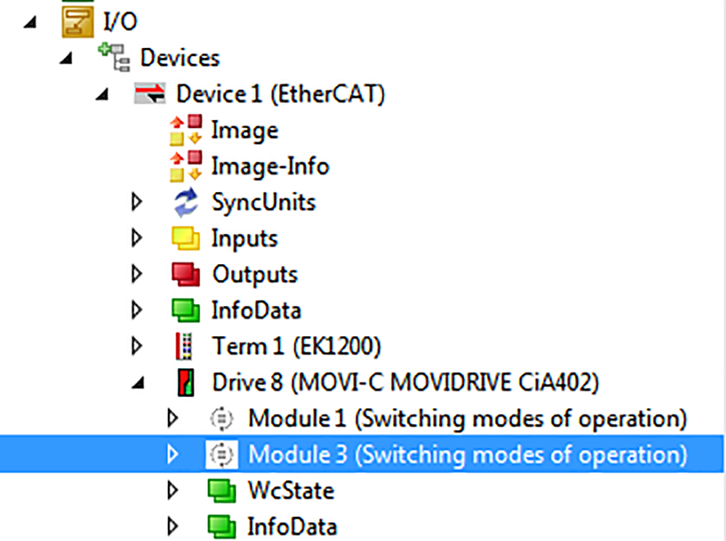
El variador debe crearse en la configuración I/O del maestro EtherCAT®.
Información adicional
- EtherCAT®: Integración de un variador mediante escaneo de la red
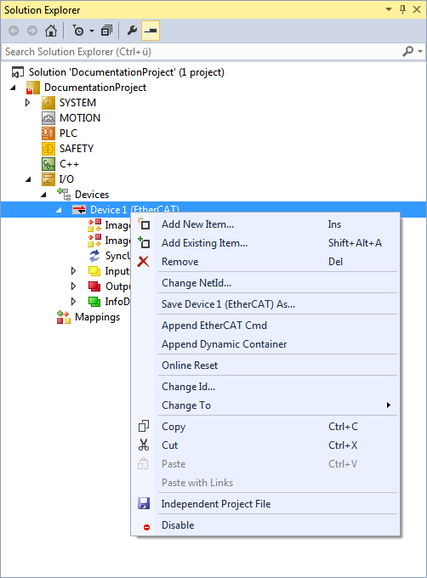
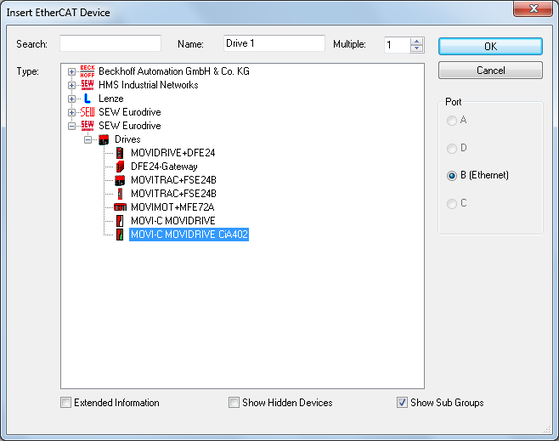
- EtherCAT®: Integración offline de variador
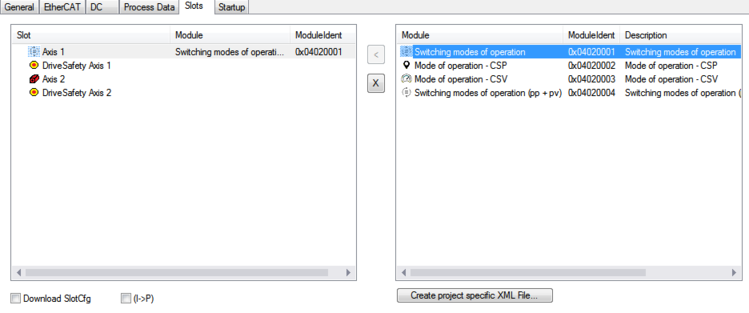
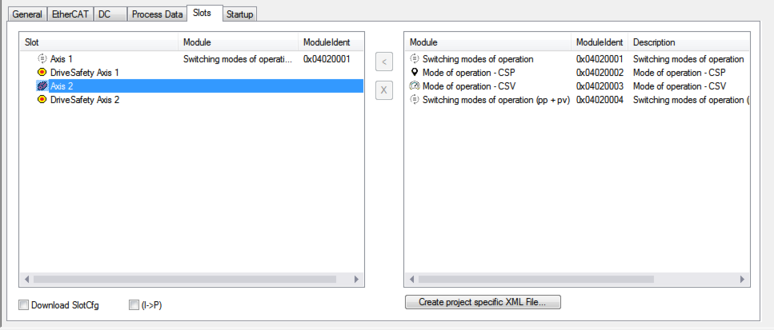
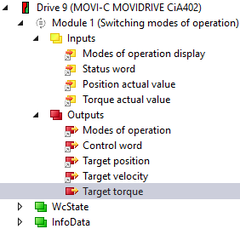
- EtherCAT®: Ajustar configuración de ranura, completar módulo de eje doble
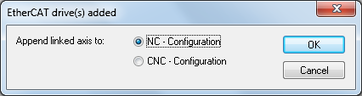
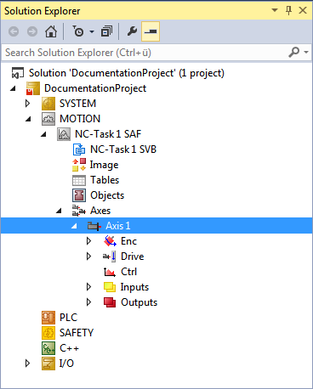
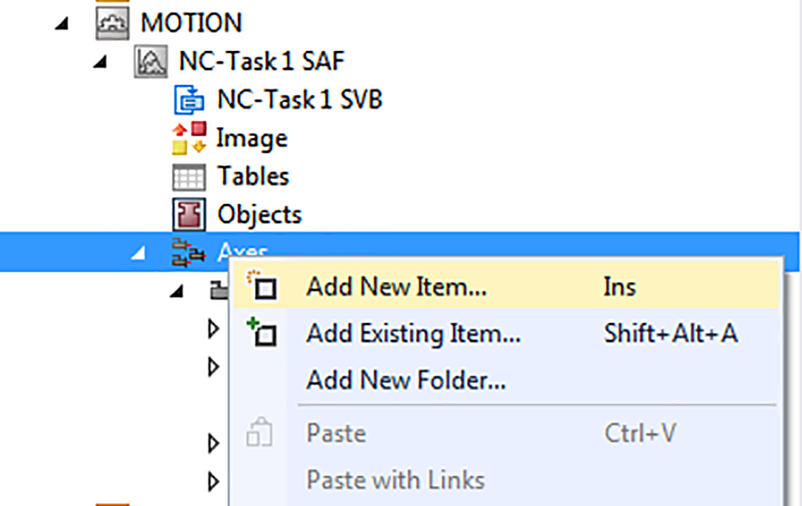
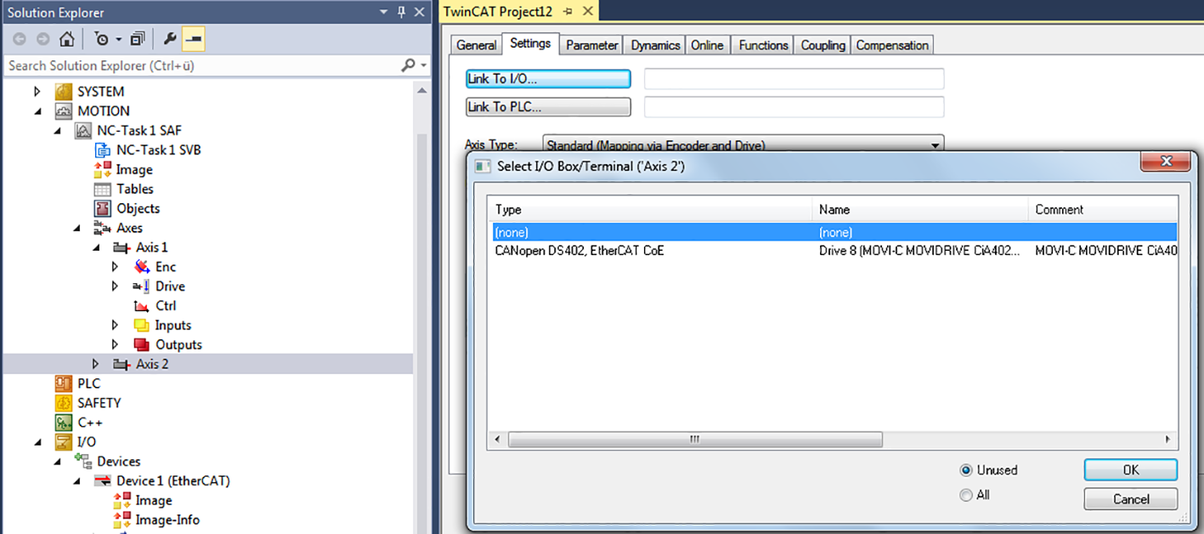
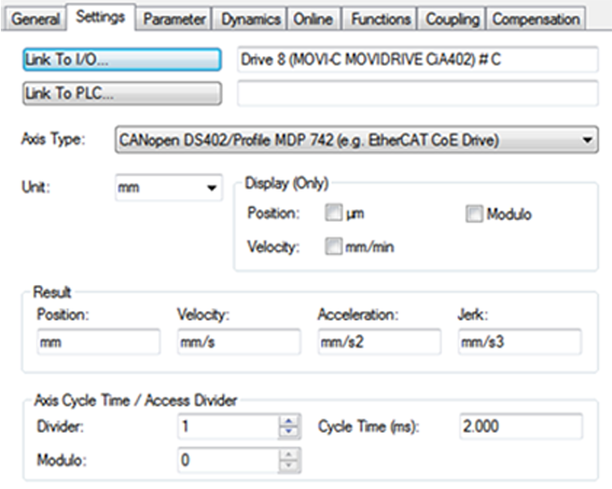
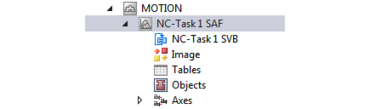
- Motion Axis: Integración de variador
- Motion Axis: Vinculación de módulo de eje doble
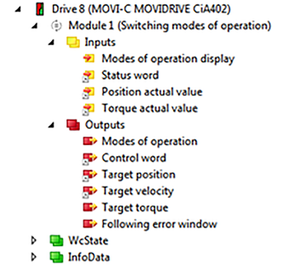
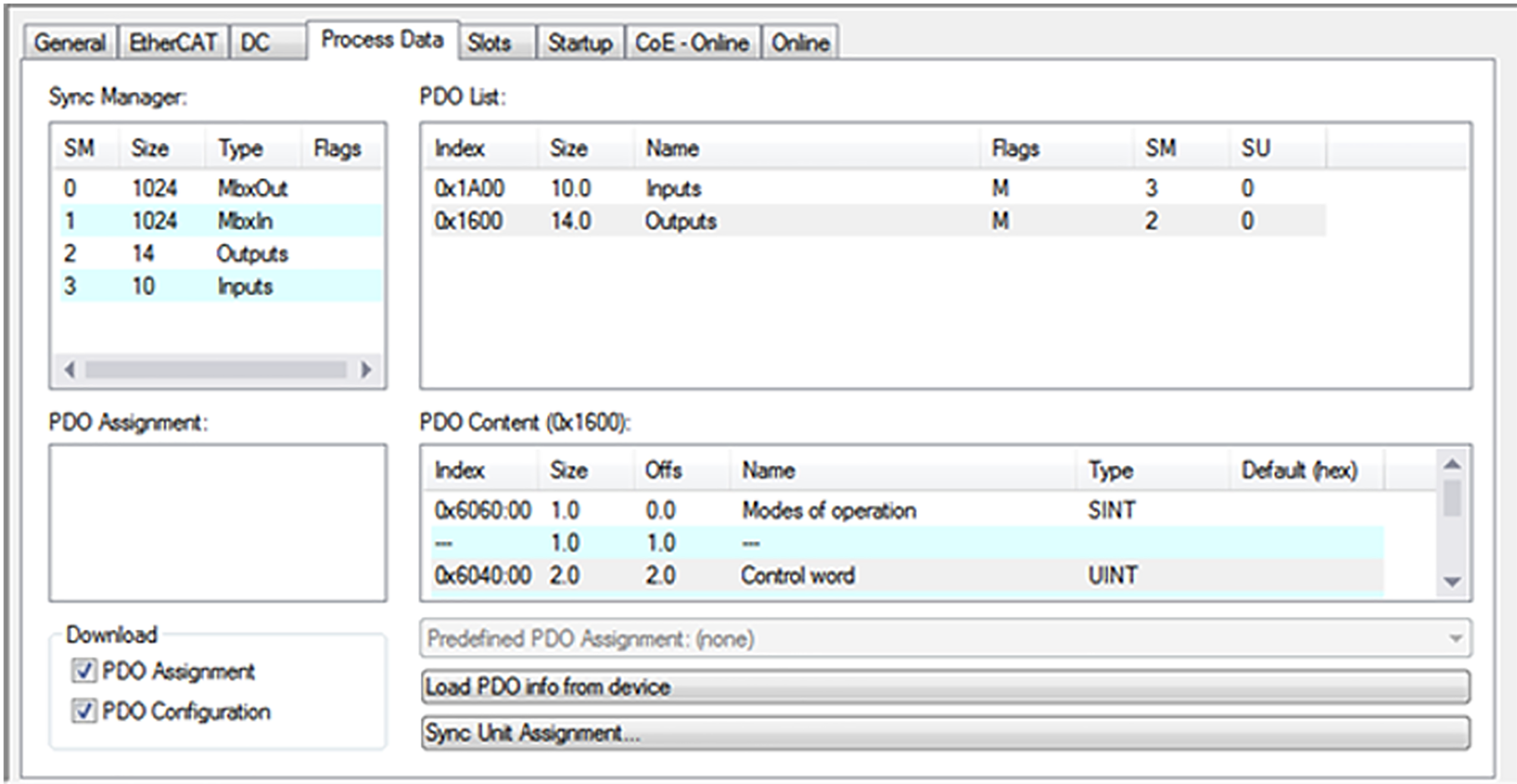
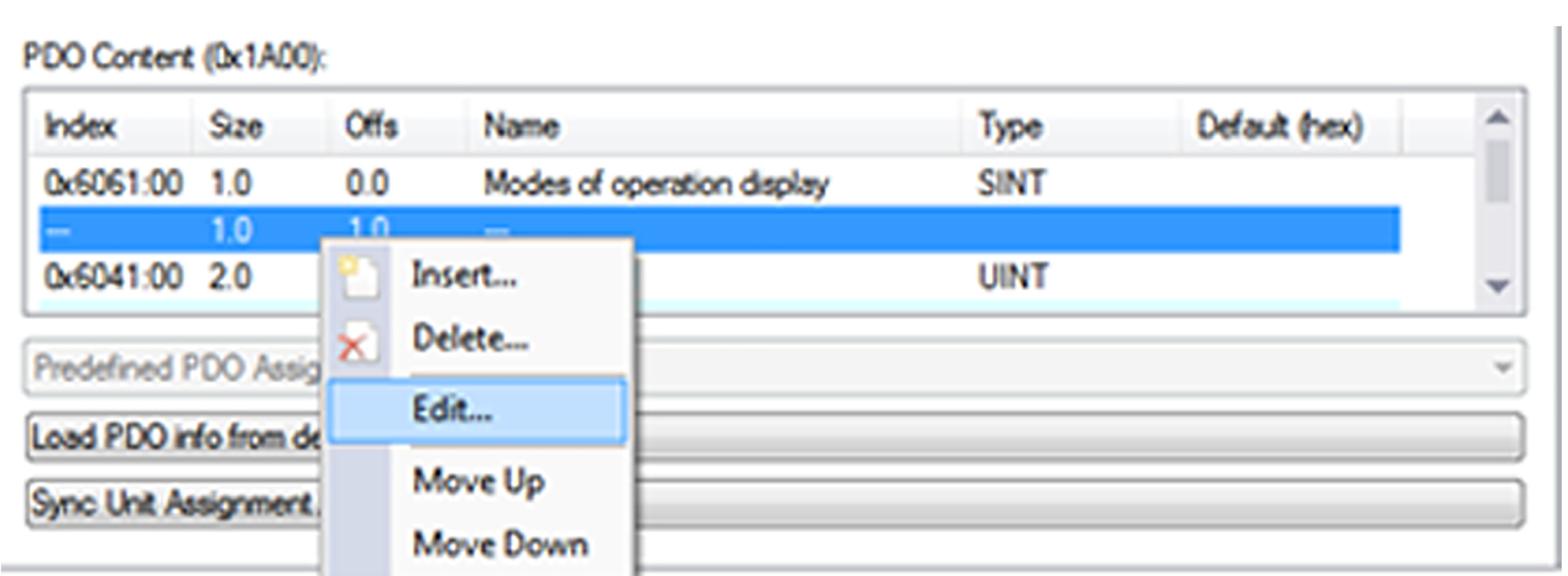
- Adaptar imagen PDO
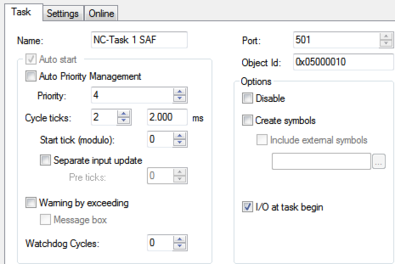
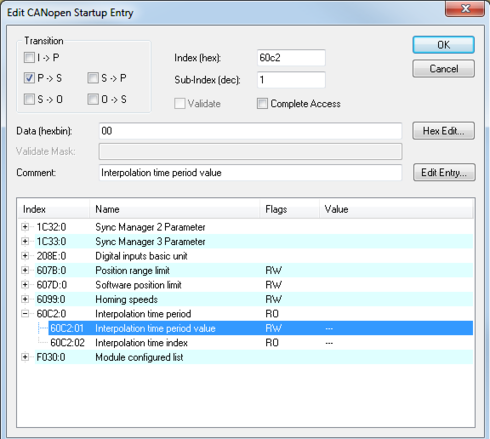
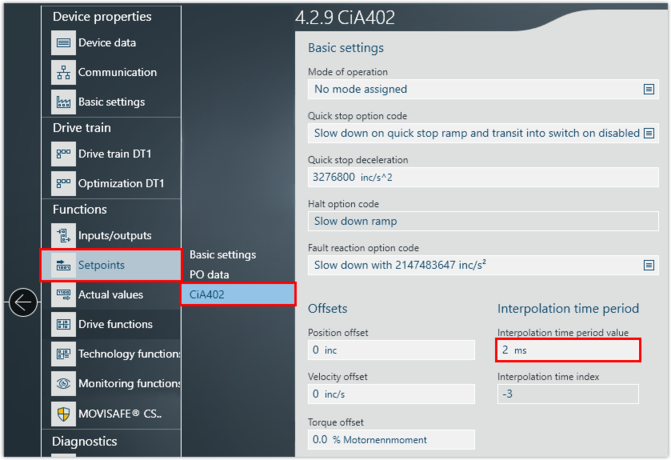
- Ajustar el tiempo de interpolación
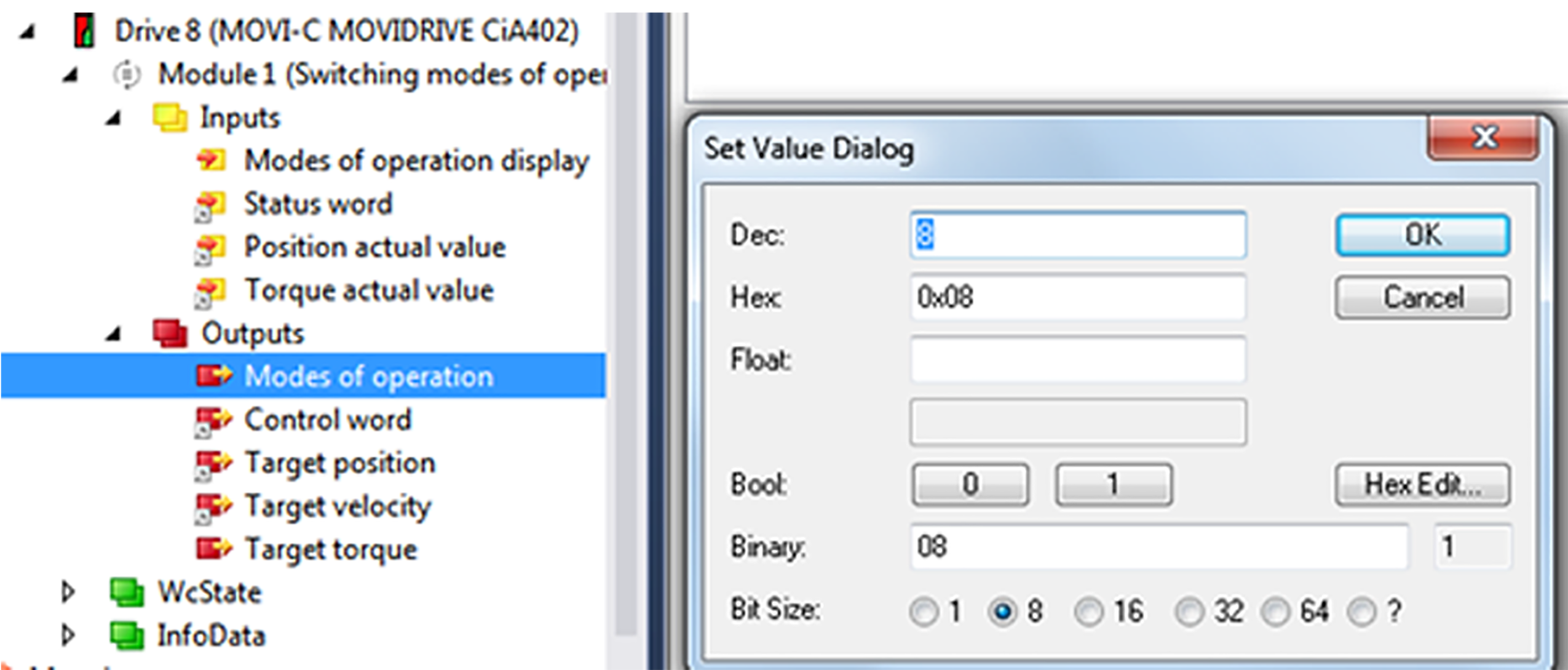
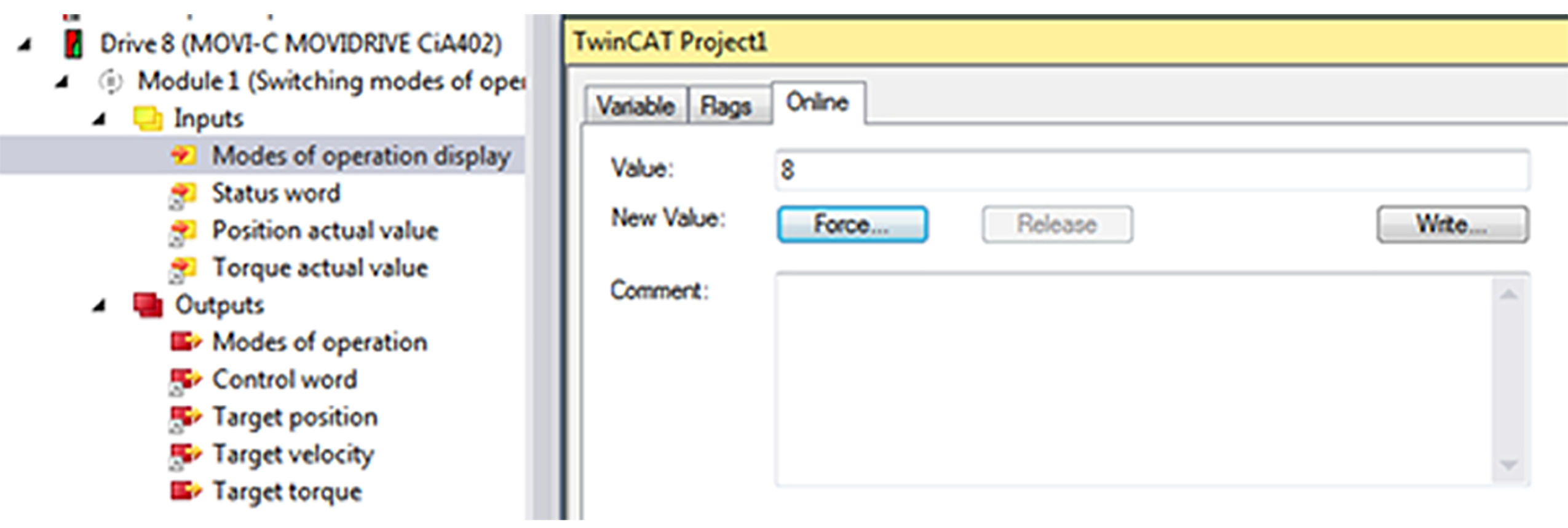
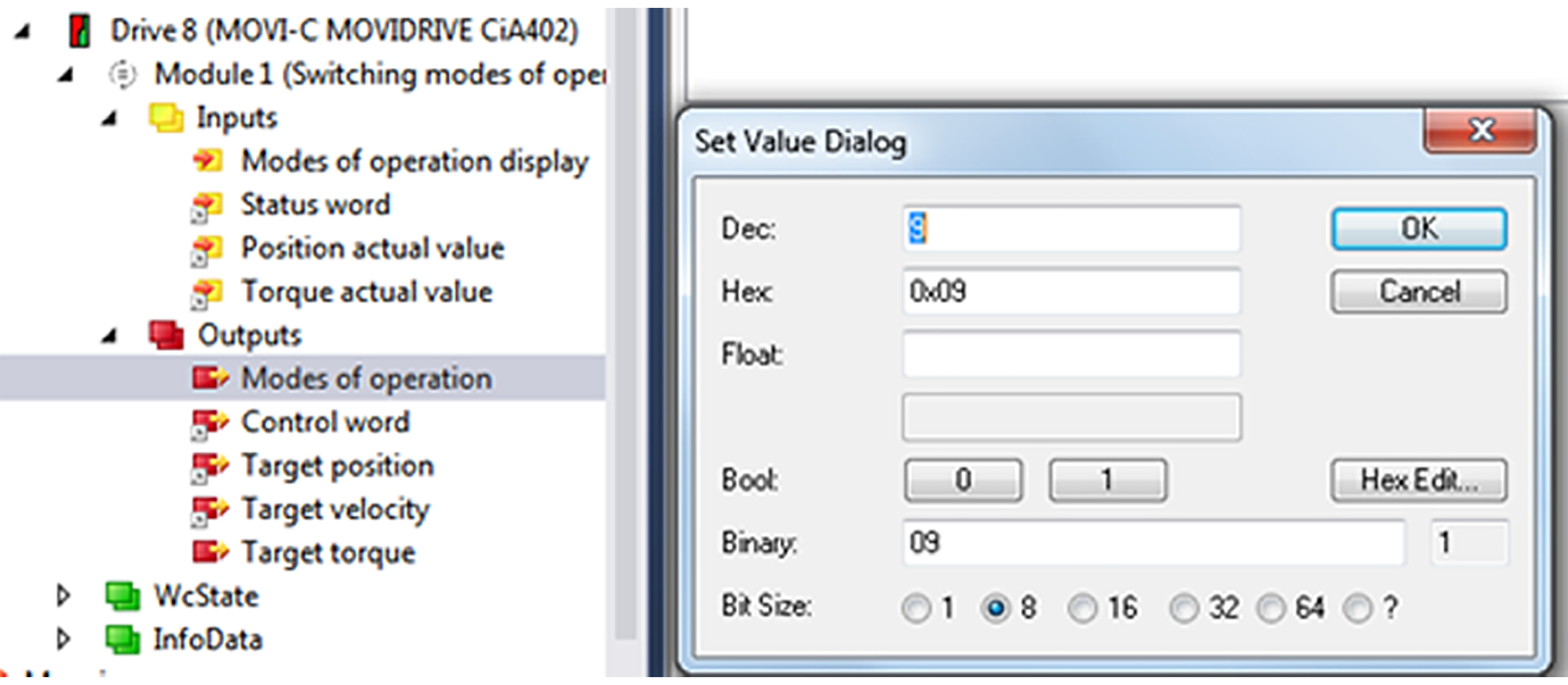
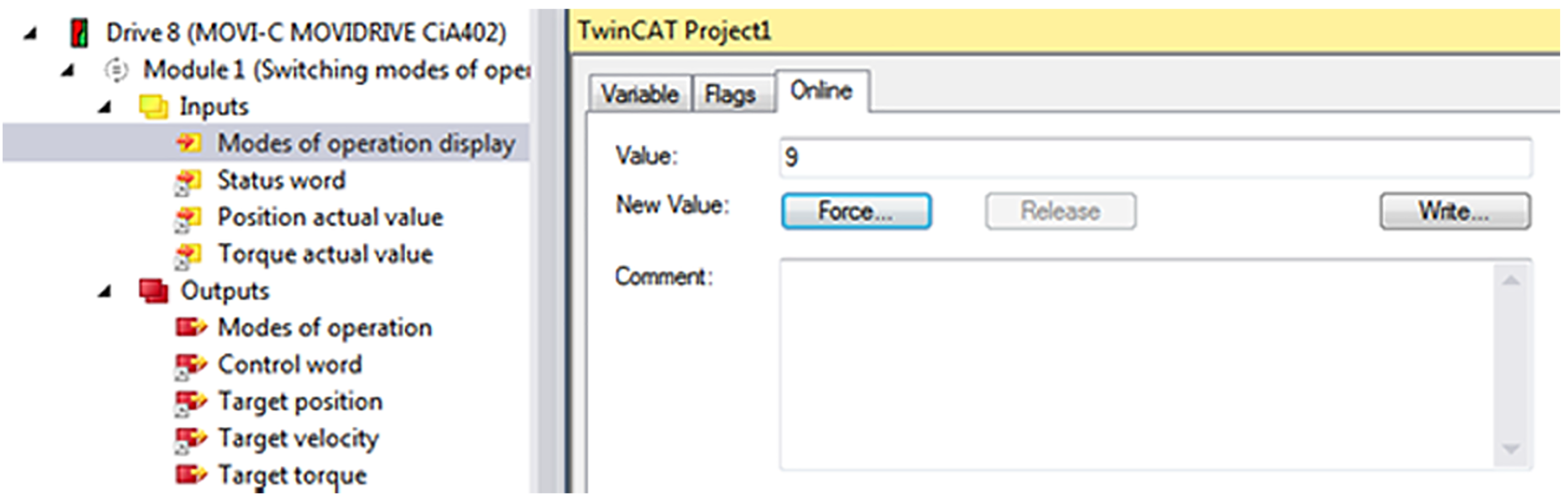
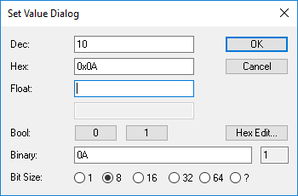
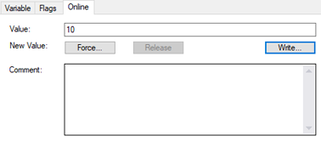
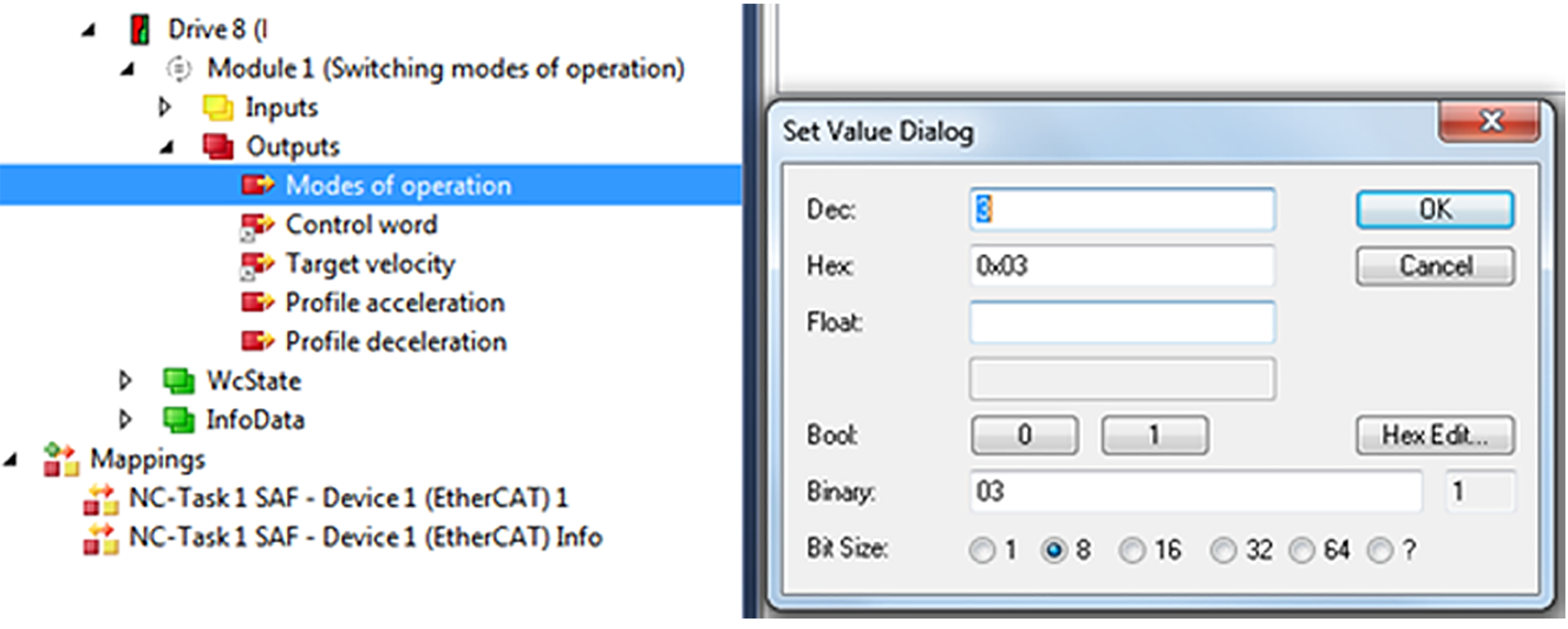
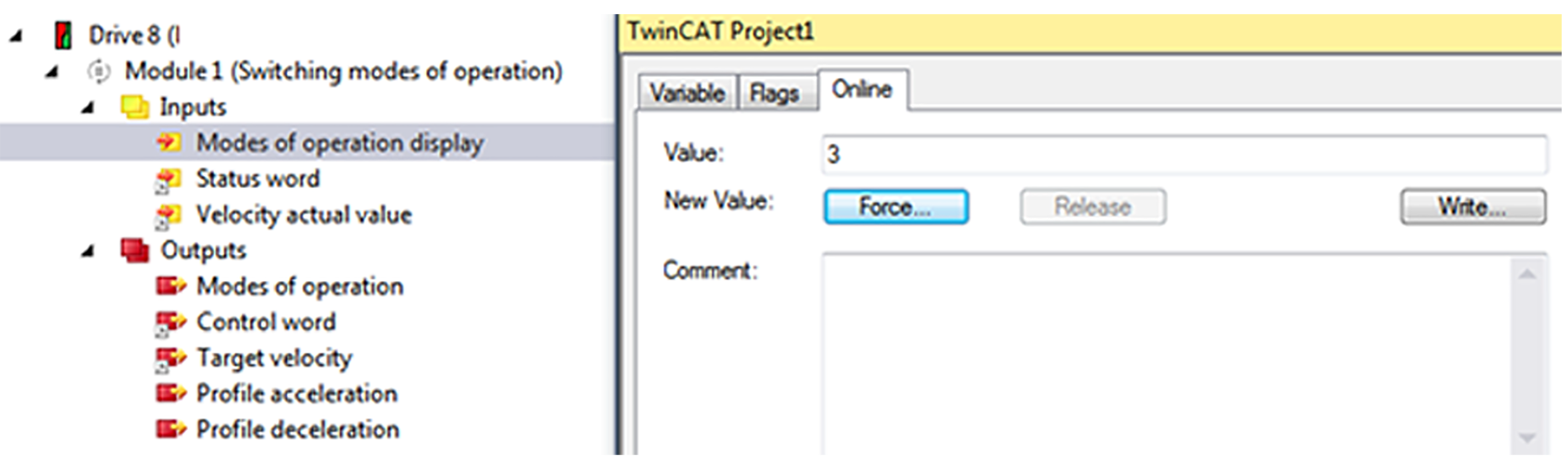
- Ajustar Mode of Operation "Cyclic Synchronous Position" (csp)
- Ajustar Mode of Operation "Cyclic Synchronous Velocity" (csv)
- Ajustar Mode of Operation "Cyclic Synchronous Torque" (cst)
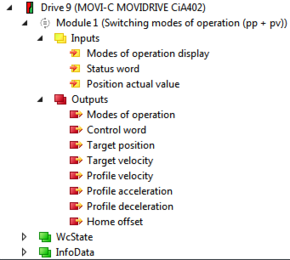
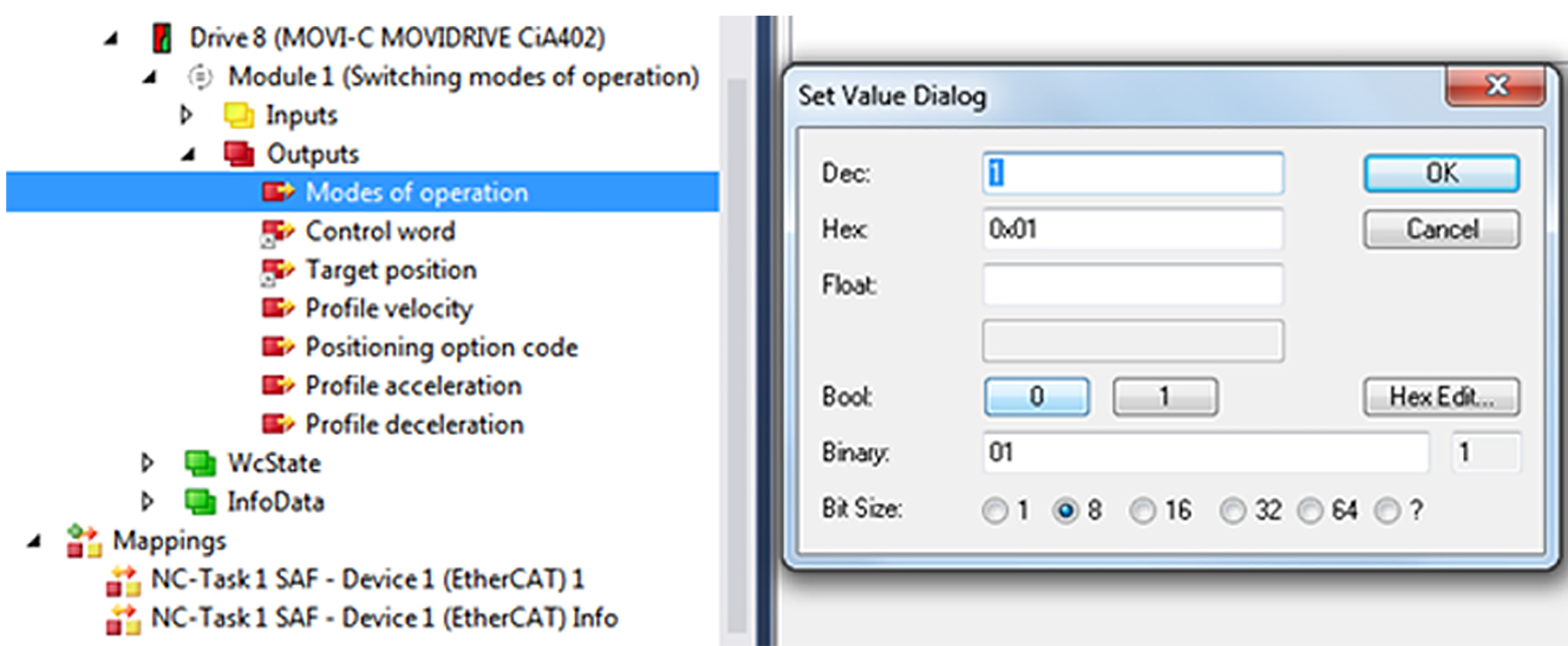
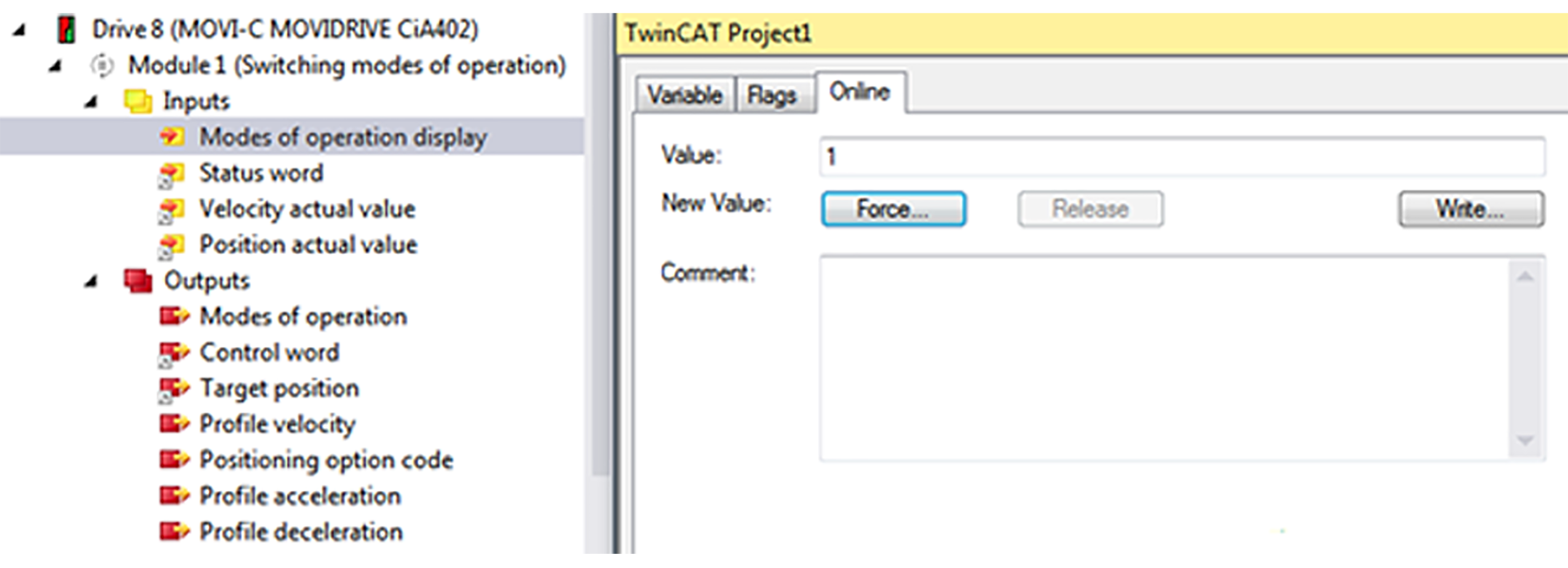
- Ajustar Mode of Operation "Profile Position" (pp)
- Ajustar Mode of Operation "Profile Velocity" (pv)
- Utilizar Mode of Operation "Homing" (hm)