Ajustar Mode of Operation "Cyclic Synchronous Position" (csp)
Este mode of operation se utiliza para la regulación de posición. En este caso es calculado por el generador de perfiles del PLC un perfil de posición y las consignas de posición se envían cíclicamente (sincronizadas) al variador. El variador debe seguir estas consignas.
La siguiente tabla muestra los objetos CiA402 necesarios o recomendados para el mode of operation. No todos los objetos deben estar en la imagen PDO cíclica.
Tenga en cuenta el número máximo de 8 entradas en la imagen PDO cíclica (véase Adaptar imagen PDO).
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Controlword | Statusword | ||
Target position | Position actual value | ||
Interpolation time period | Following error actual value (recommended) | ||
Proceda como se indica a continuación:
- Usted ha puesto en marcha exitosamente el motor.
- Usted ha integrado el variador mediante escaneo de red u offline del catálogo de unidades en el proyecto TwinCAT, lo ha vinculado con un eje Motion (véase Motion Axis: Integración de variador) y ha aceptado el objeto de datos de proceso correspondiente en la imagen PDO (véase Adaptar imagen PDO).
- Ajuste las unidades de referencia para distancia (mm), ángulo (°), tiempo (s), etc.
- Ajuste las unidades de usuario deseadas. Al hacerlo, tenga en cuenta el índice de reducción y que las revoluciones del motor sigan conformes a CiA402 (216 incrementos/vuelta).
- Ajuste la dinámica de movimiento. Indique para ello la velocidad máxima y las rampas acel./decel.
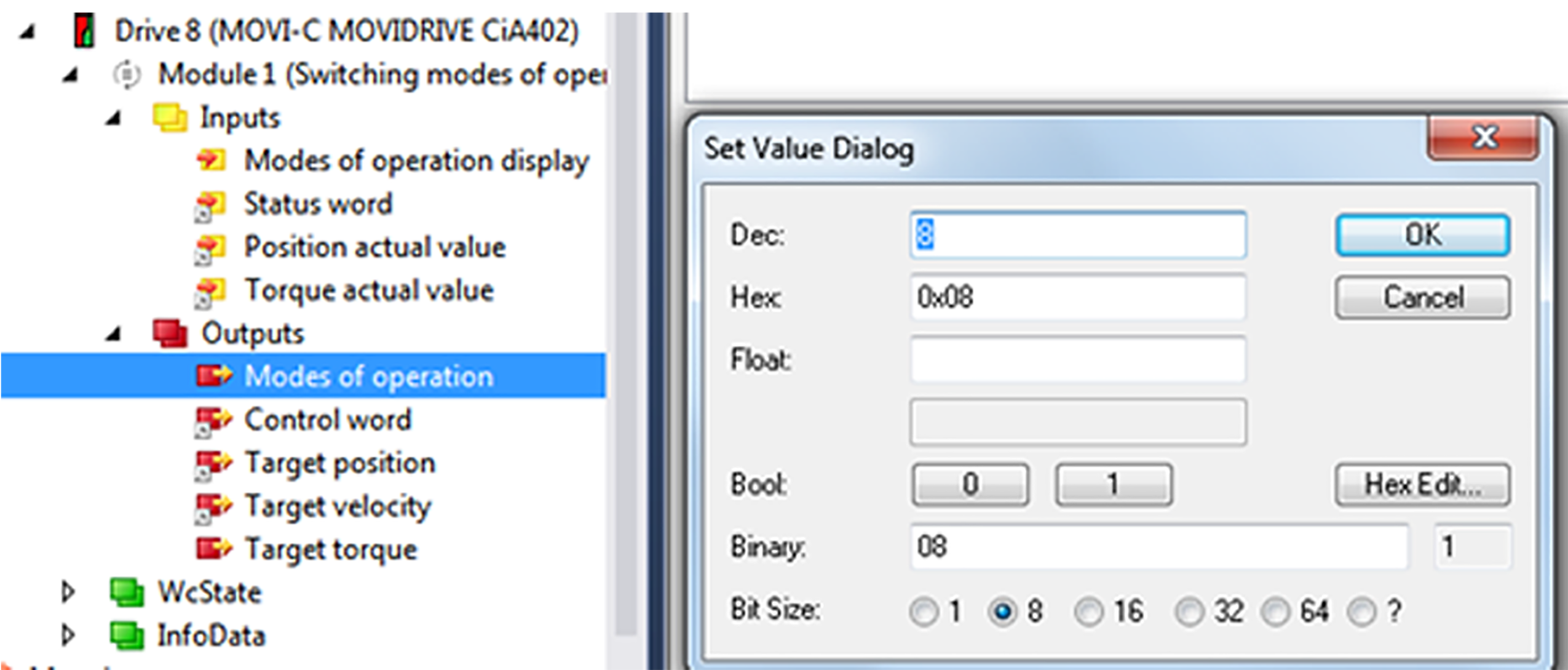
- Ajuste en el objeto de datos de proceso "Modes of operation" csp. Introduzca para este fin el valor "8" en la ventana del editor.
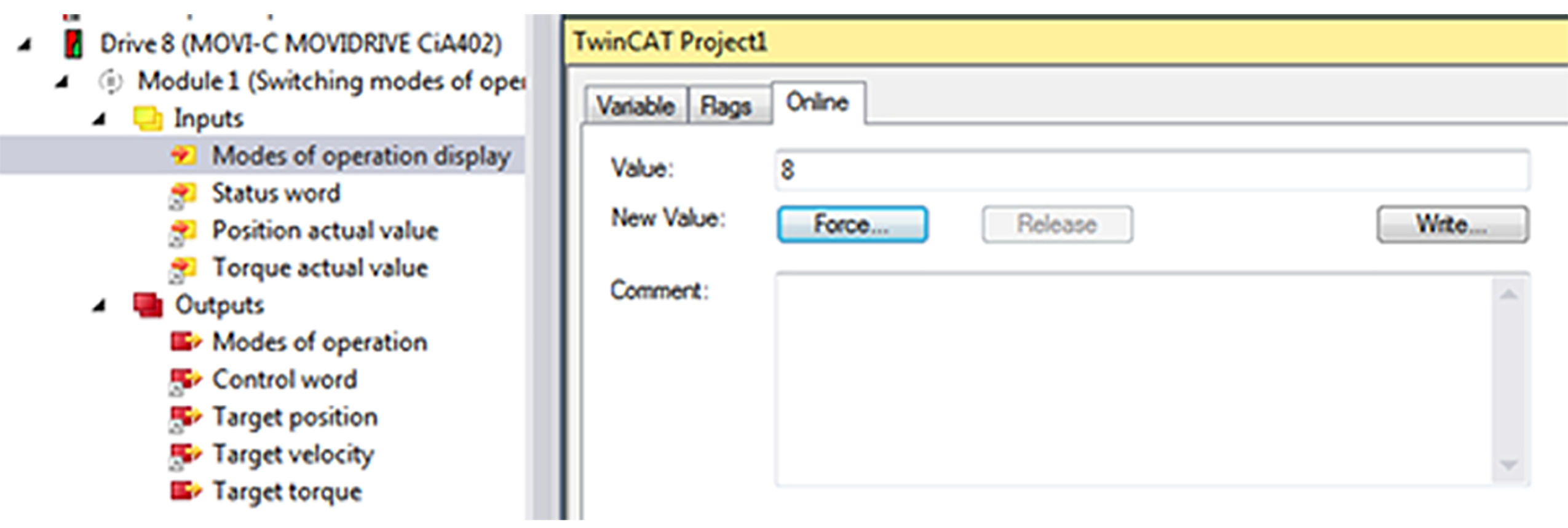
- En el objeto de datos de proceso "Modes of operation display" se señaliza el valor "8".
- En el elemento de display del variador se muestra el valor "16".