Mode of Operation "Cyclic Synchronous Position" (csp) einstellen
Dieser mode of operation wird für die Lageregelung eingesetzt. Dabei wird durch den Profilgenerator der SPS ein Positionsprofil berechnet und die Positions-Sollwerte zyklisch (taktsynchron) an den Umrichter gesendet. Der Umrichter soll diesen Sollwerten folgen.
Die folgende Tabelle zeigt die CiA402-Objekte, die für den mode of operation erforderlich sind oder empfohlen werden. Nicht alle Objekte müssen im zyklischen PDO-Abbild liegen.
Beachten Sie die maximale Anzahl von 8 Einträgen im zyklischen PDO-Abbild (siehe PDO-Abbild anpassen).
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Controlword | Statusword | ||
Target position | Position actual value | ||
Interpolation time period | Following error actual value (recommended) | ||
Gehen Sie folgendermaßen vor:
- Sie haben den Motor erfolgreich in Betrieb genommen.
- Sie haben den Umrichter durch Netzwerk-Scan oder offline aus dem Gerätekatalog in das TwinCAT-Projekt eingebunden, mit einer Motion-Achse verknüpft (siehe Motion Axis: Umrichter einbinden) und das entsprechende Prozessdatenobjekt in das PDO-Abbild übernommen (siehe PDO-Abbild anpassen).
- Stellen Sie die Bezugseinheiten für die Entfernung (mm), Winkel (°), Zeit (s) usw. ein.
- Stellen Sie die gewünschten Anwendereinheiten ein. Achten Sie dabei auf die Getriebeübersetzung und, dass die Motorumdrehung CiA402‑konform (216 Inkremente/Umdrehung) bleibt.
- Stellen Sie den Bewegungsdynamik ein. Geben Sie dazu die Maximalgeschwindigkeit und die Rampen auf/ab an.
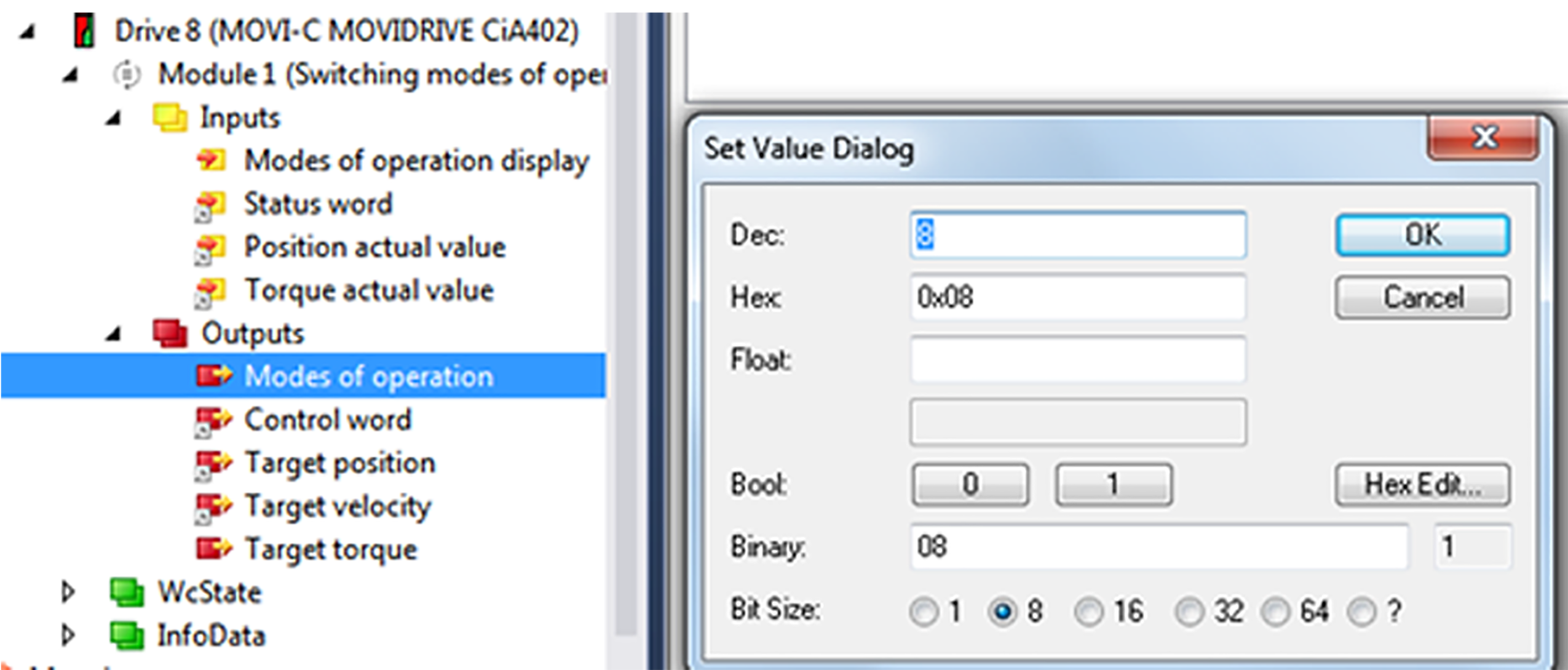
- Stellen Sie im Prozessdatenobjekt "Modes of operation" csp ein. Tragen Sie dazu den Wert "8" im Editorfenster ein.
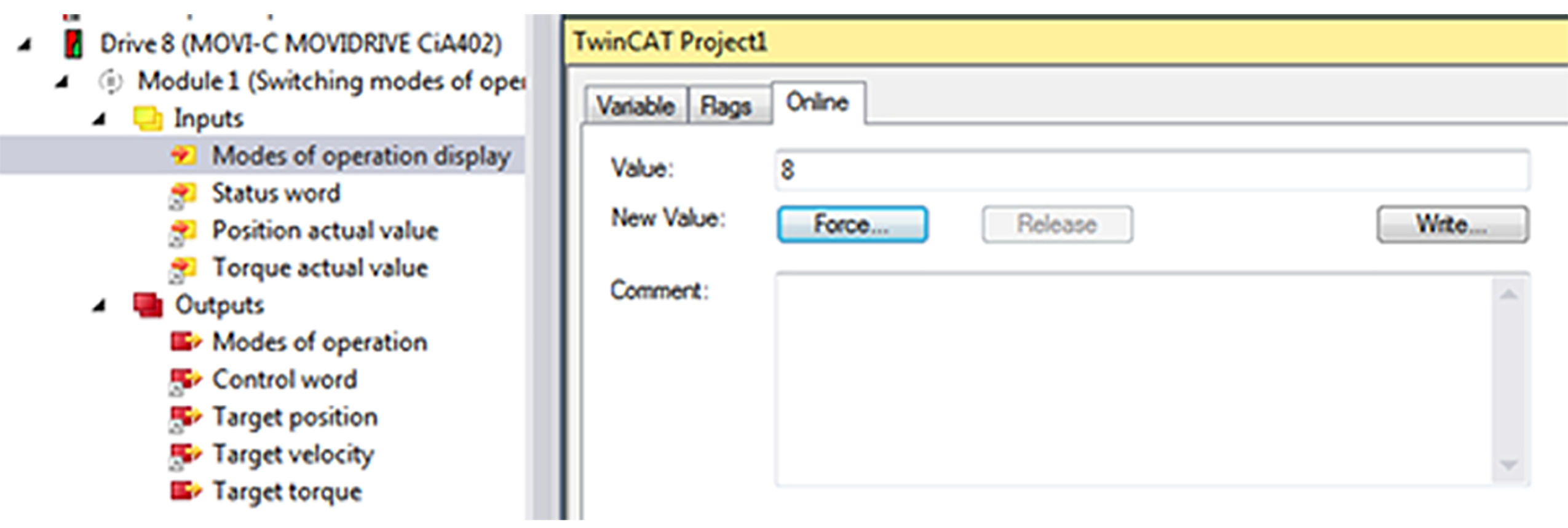
- Im Prozessdatenobjekt "Modes of operation display" wird der Wert "8" zurückgemeldet.
- Auf das Anzeige-Element des Umrichters wird der Wert "16" angezeigt.