Réglage du Mode of operation "Cyclic Synchronous Position" (csp)
Ce Mode of operation est utilisé pour la régulation de position. Dans ce mode, le générateur de profil de l'API est utilisé pour calculer un profil de position et envoyer de manière cyclique (isochrone) les consignes de position au variateur de vitesse. Le variateur devra suivre ces consignes.
Le tableau suivant indique les objets CiA402 nécessaires ou recommandés pour le Mode of operation. Les objets ne doivent pas tous nécessairement figurer dans la représentation PDO cyclique.
Tenir compte du nombre maximal de huit entrées dans la représentation PDO cyclique (voir Adaptation de la représentation PDO).
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Control word | Status word | ||
Target position | Position actual value | ||
Interpolation time period | Following error actual value (recommended) | ||
Procéder comme suit.
- La mise en service du moteur a été effectuée correctement.
- Le variateur de vitesse a été intégré, depuis le catalogue d'appareils, dans le projet TwinCAT par scrutation réseau ou en mode hors ligne et connecté avec un axe Motion (voir Axe Motion : intégration du variateur de vitesse) ; l'objet données process correspondant a été transféré dans la représentation PDO (voir Adaptation de la représentation PDO).
- Régler les unités de référence pour la distance (mm), l'angle (°), la durée (s), etc.
- Régler les unités utilisateur souhaitées. Tenir compte du rapport de réduction et veiller à ce que le tour moteur reste conforme au profil CiA402 (216 incréments/tour).
- Régler la dynamique du mouvement. Pour cela, indiquer la vitesse maximale et les rampes d'accélération et de décélération.
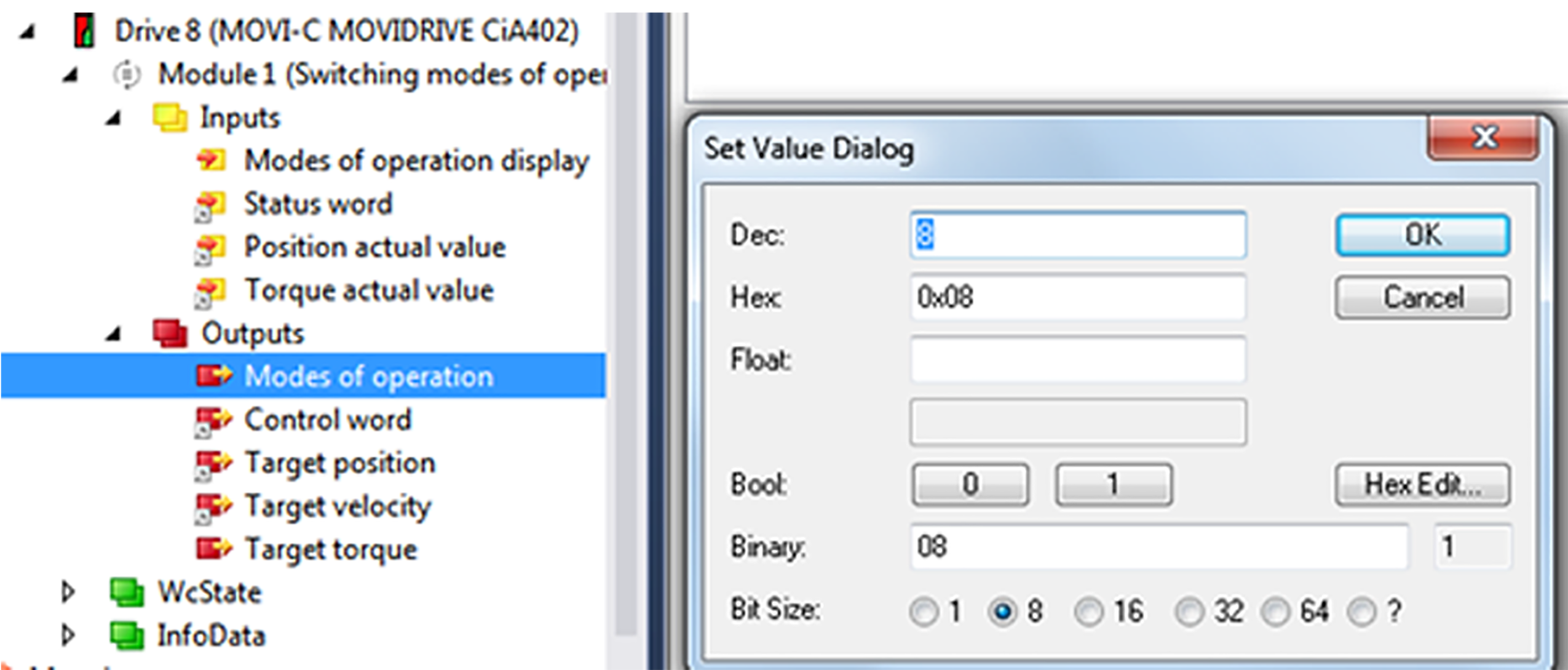
- Régler l'objet données process "Modes of operation" sur csp. Pour cela, régler la valeur "8" dans la fenêtre d'édition.
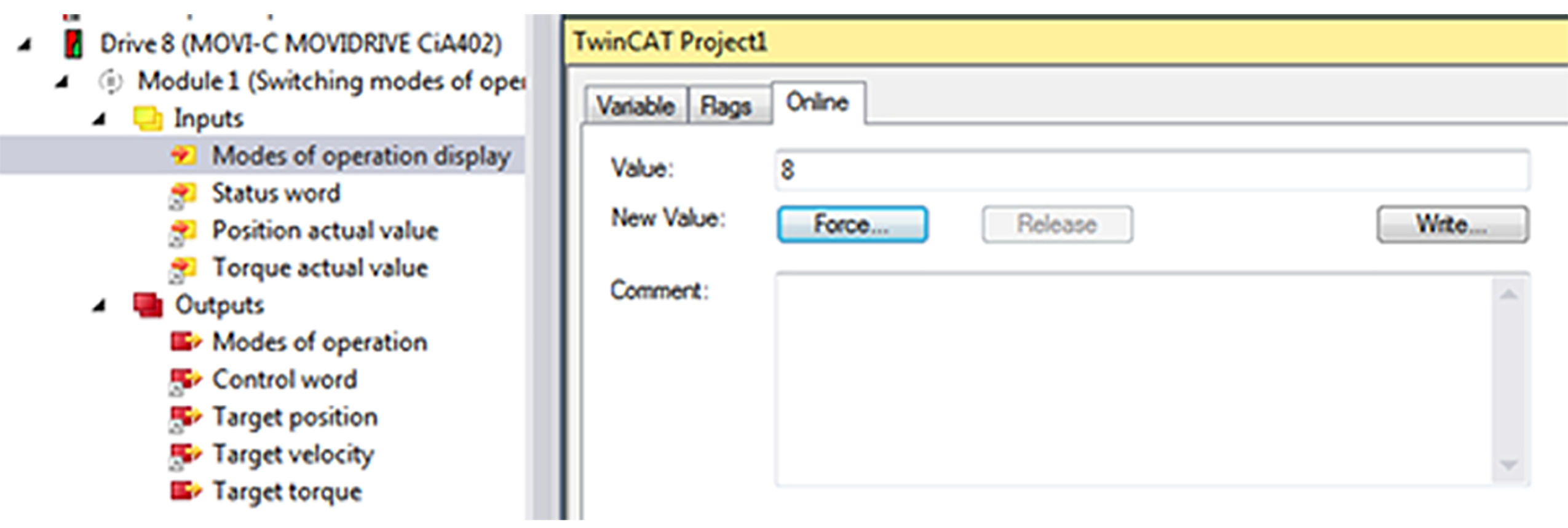
- La valeur "8" est retournée dans l'objet données process "Modes of operation display".
- La valeur "16" apparaît sur l'élément d'affichage du variateur de vitesse.