Réglage de la durée d'interpolation
Afin d'éviter des erreurs d'interpolation, qui entraînent une diminution de la performance de régulation, la durée d'interpolation doit être identique dans l'API et dans le variateur de vitesse.
La durée d'interpolation peut être adaptée dans le variateur de vitesse
- dans le logiciel d'ingénierie MOVISUITE®
- pendant la phase de démarrage du maître EtherCAT®, dans la liste de démarrage via la fonction
CoE (SdO)
Procéder comme suit.
- Le réseau EtherCAT® a été représenté dans un projet TwinCAT.
- Le variateur de vitesse a été intégré dans un projet MOVISUITE®.
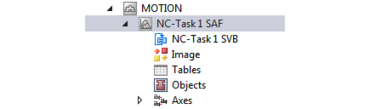
- Dans la gestion de projet, ouvrir par un clic droit le menu contextuel de l'entrée "NC-Task. SAF" dans la zone "MOTION".
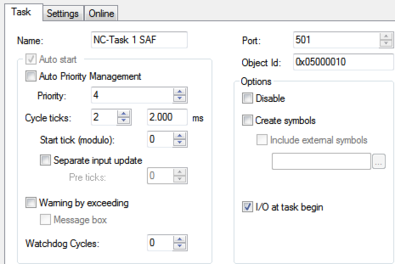
- Dans l'onglet "Task", régler la durée d'interpolation du maître EtherCAT®. Le réglage standard est de 2 ms.
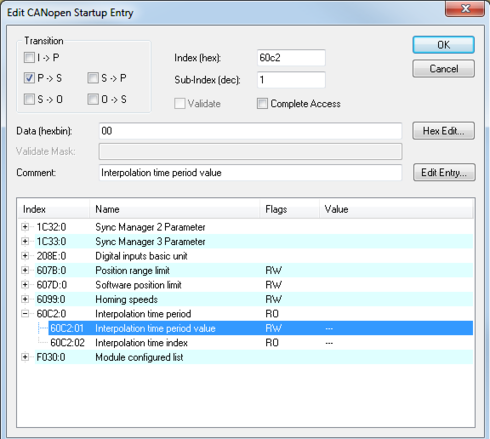
- Pour indiquer la durée d'interpolation du variateur de vitesse dans la liste de démarrage du maître EtherCAT®, sélectionner l'onglet "Startup".
- Cliquer sur [New].
- Une fenêtre pour le réglage du comportement au démarrage s'affiche.
- Renseigner la durée d'interpolation en ms.
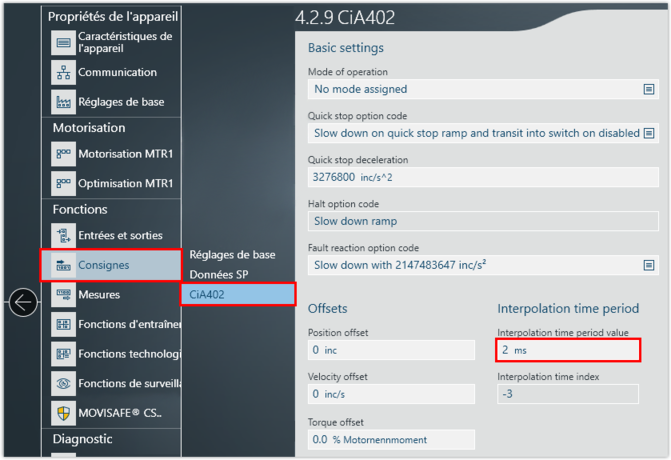
- Pour indiquer la durée d'interpolation du variateur de vitesse dans le logiciel d'ingénierie MOVISUITE®, passer dans le projet MOVISUITE®.
- Ouvrir la configuration du variateur de vitesse et régler la durée d'interpolation. Veiller à régler pour le variateur la même valeur que pour le maître EtherCAT® dans le projet TwinCAT. En cas de modification de la durée d'interpolation dans le maître EtherCAT®, modifier également la durée d'interpolation dans le variateur de vitesse.