Ajustar tempo de interpolação
Para evitar erros de interpolação que levam a perdas no desempenho do controle, os tempos de interpolação no CLP e no conversor devem coincidir.
O tempo de interpolação pode ser ajustado no conversor:
- no software de engenharia MOVISUITE®
- durante a fase de inicialização do mestre EtherCAT® na lista de inicialização através do serviço
CoE (SdO)
Proceda da seguinte forma:
- Você mapeou a rede EtherCAT® em um projeto TwinCAT.
- Você integrou o conversor em um projeto MOVISUITE®.
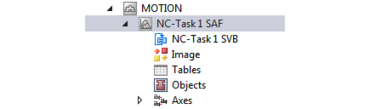
- Na gestão de projetos na área "MOTION", abrir o menu de contexto da entrada "NC-Task" (Tarefa NC) com a tecla direita do mouse. SAF".
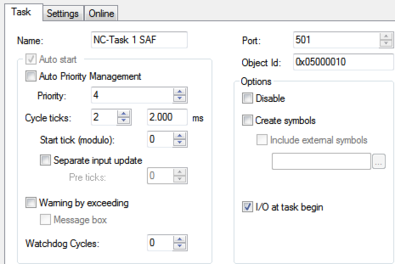
- Definir o tempo de interpolação do mestre EtherCAT® na aba "Task" (Tarefa). O ajuste padrão é 2 ms.
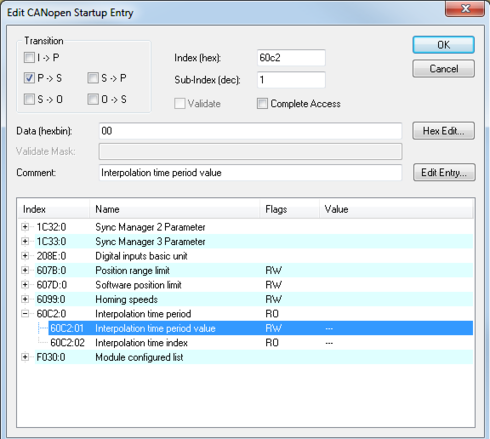
- Se você deseja inserir o tempo de interpolação do conversor na lista de inicialização do mestre EtherCAT®, selecione a aba "Inicialização".
- Clicar na tecla [Novo].
- Uma janela com ajustes do comportamento de inicialização é exibida.
- Inserir o tempo de interpolação em ms.
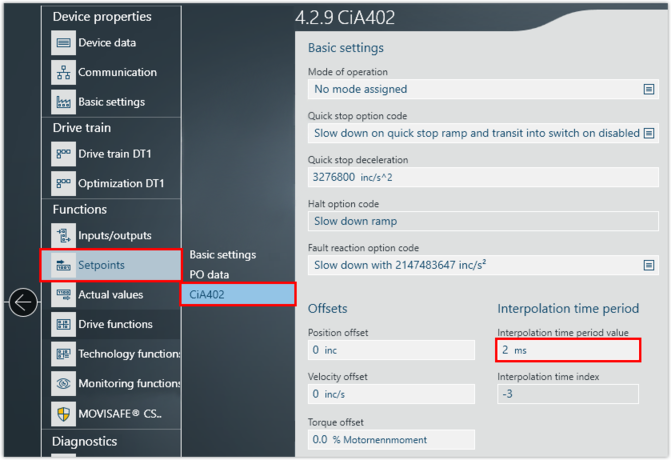
- Se desejar inserir o tempo de interpolação do conversor no software de engenharia MOVISUITE®, mudar para o projeto MOVISUITE®.
- Para isso, abrir a configuração do conversor e definir o tempo de interpolação. Certificar-se de definir o mesmo valor para o conversor e para o mestre EtherCAT® no projeto TwinCAT. Se você alterar o tempo de interpolação no mestre EtherCAT®, também deverá alterar o tempo de interpolação no conversor.