Ajustar o modo de operação "Cyclic Synchronous Position" (csp)
Este modo de operação é usado para controle de posicionamento. Um perfil de posição é calculado pelo gerador de perfil do CLP e os valores nominais de posição são enviados ciclicamente (sincronicamente) para o conversor. O conversor deve seguir esses valores nominais.
A tabela a seguir mostra os objetos CiA402 necessários ou recomendados para o modo de operação. Nem todos os objetos precisam estar na imagem PDO cíclica.
Observar o número máximo de 8 entradas na imagem PDO cíclica (consultar Ajustar imagem PDO).
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Controlword | Statusword | ||
Target position | Position actual value | ||
Interpolation time period | Following error actual value (recommended) | ||
Proceda da seguinte forma:
- Você colocou o motor em operação com sucesso.
- Você integrou o conversor no projeto TwinCAT por meio de uma varredura de rede ou off-line a partir do catálogo de unidades, vinculou-o a um eixo de movimento (ver Motion Axis: integrar conversor) e transferiu o objeto de dados de processo correspondente para a imagem PDO (ver Ajustar imagem PDO).
- Definir as unidades de referência para distância (mm), ângulo (°), tempo (s) etc.
- Definir as unidades do usuário desejadas. Observar a relação do redutor e que a rotação do motor permaneça compatível com CiA402 (216 incrementos/revolução).
- Definir a dinâmica do movimento. Para isso, inserir a velocidade máxima e as rampas de subida/descida.
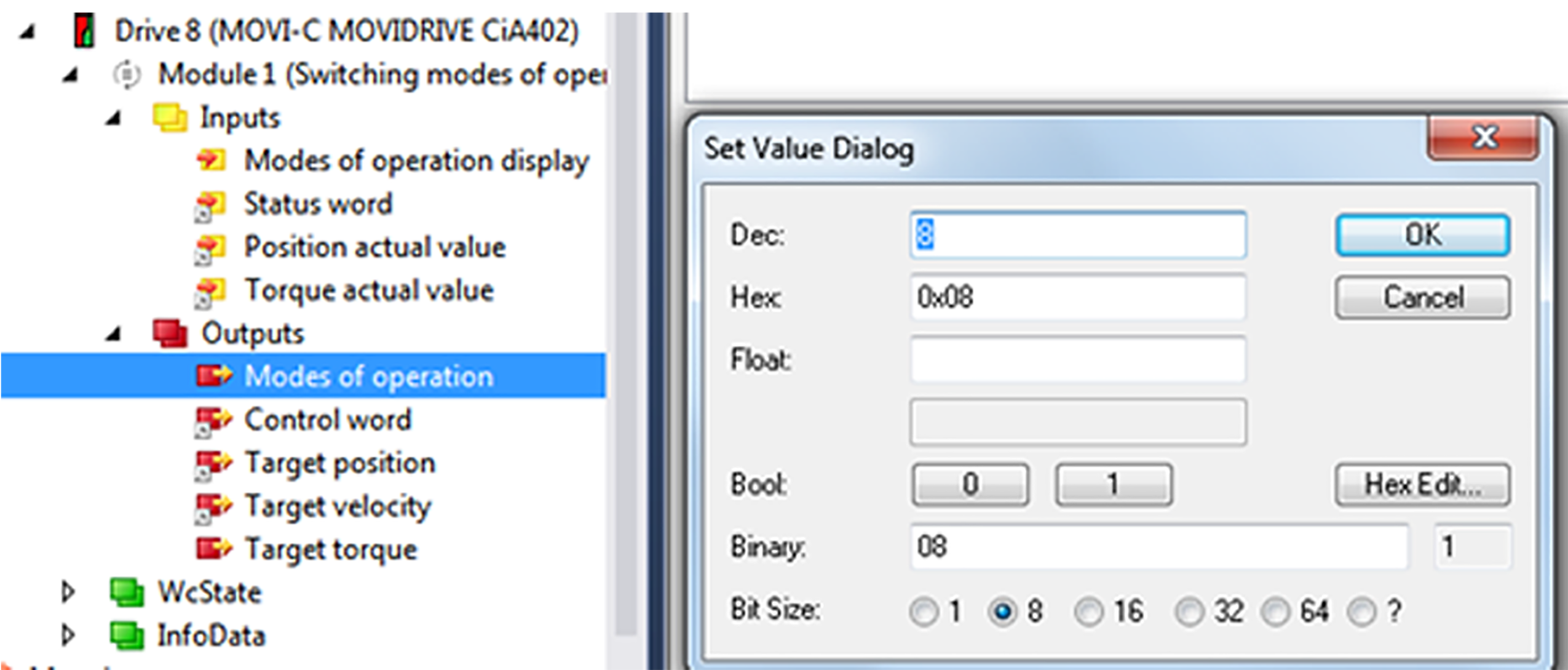
- Ajustar csp no objeto de dados de processo "Modes of operation" (Modos de operação). Para isso, inserir o valor "8" na janela do editor.
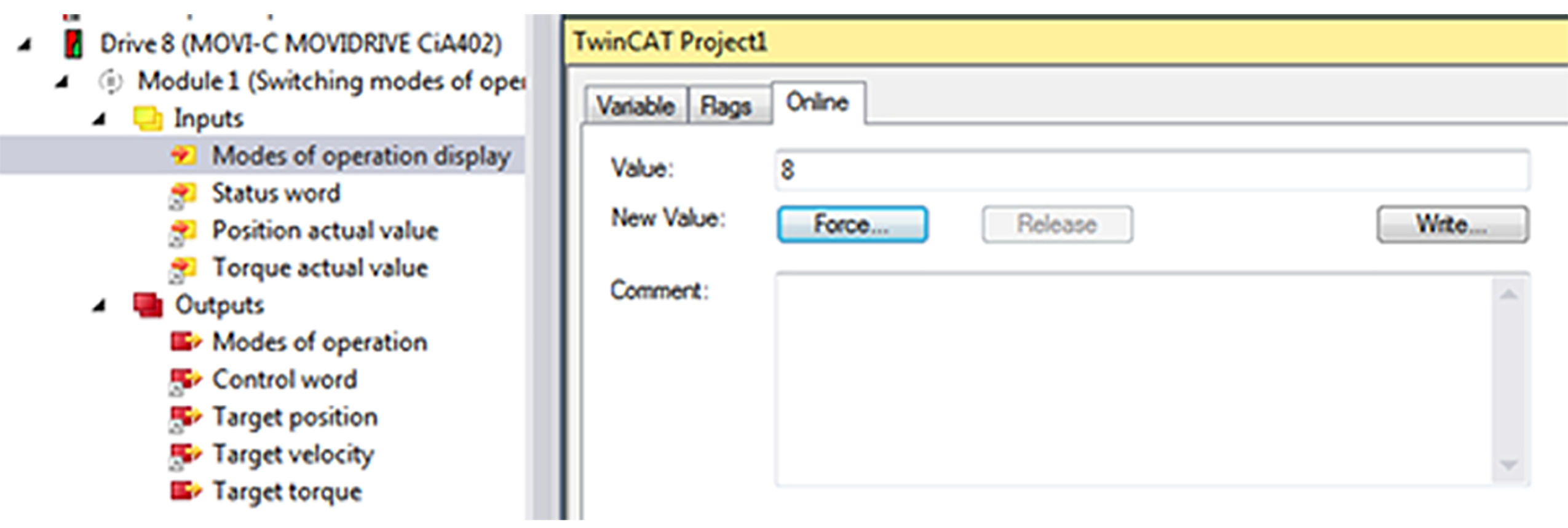
- O valor "8" é reportado no objeto de dados de processo "Modes of operation display" (Indicação dos modos de operação).
- O valor "16" é exibido no elemento de indicação do conversor.