Mode of Operation "Cyclic Synchronous Velocity" (csv) einstellen
Dieser mode of operation wird für die Positionierung und die Drehzahlregelung eingesetzt. Dabei wird durch den Profilgenerator der SPS ein Positionsprofil berechnet und Geschwindigkeitssollwerte zyklisch (taktsynchron) an den Umrichter gesendet.
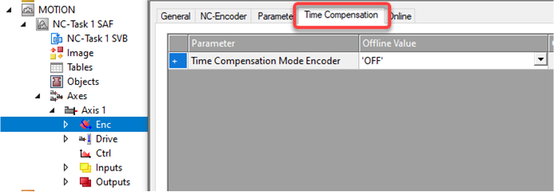
Da der Antrieb im Drehzahlmodus ist, muss der aktuelle Schleppfehler auf dem Master berechnet werden. Beachten Sie, dass die vom Antrieb zurückgemeldete "Position actual value" technisch aufgrund der Interpolation zu einem früheren Sollwertzyklus gehört. Um den aktuellen Schleppfehler korrekt zu berechnen, muss eine Totzeitkompensation erfolgen. Die Totzeit liegt typischerweise zwischen 3 und 4 Sollwertzyklen. In der Praxis haben sich 3,5 Sollwertzyklen als hinreichend genaue Näherung bewährt.
Die folgende Tabelle zeigt die CiA402-Objekte, die für den mode of operation erforderlich sind oder empfohlen werden. Nicht alle Objekte müssen im zyklischen PDO-Abbild liegen.
Beachten Sie die maximale Anzahl von 8 Einträgen im zyklischen PDO-Abbild (siehe PDO-Abbild anpassen).
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Controlword | Statusword | ||
Target velocity | Position actual value | ||
Interpolation time period |
| ||
Gehen Sie folgendermaßen vor:
- Sie haben den Motor erfolgreich in Betrieb genommen.
- Sie haben den Umrichter durch Netzwerk-Scan oder offline aus dem Gerätekatalog in das TwinCAT-Projekt eingebunden, mit einer Motion-Achse verknüpft (siehe Motion Axis: Umrichter einbinden) und das entsprechende Prozessdatenobjekt in das PDO-Abbild übernommen (siehe PDO-Abbild anpassen).
- Stellen Sie die Bezugseinheiten für die Entfernung (mm), Winkel (°), Zeit (s) usw. ein.
- Stellen Sie die gewünschten Anwendereinheiten ein. Achten Sie dabei auf die Getriebeübersetzung und, dass die Motorumdrehung CiA402‑konform (216 Inkremente/Umdrehung) bleibt.
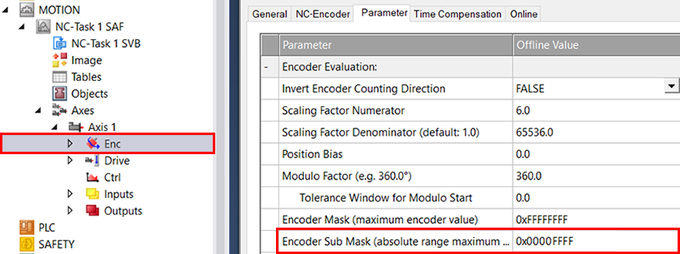
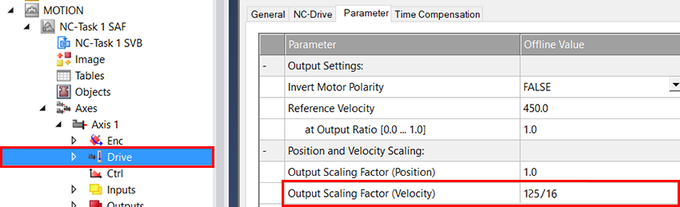
- Legen Sie für die Motion-Achse Einstellungen für den Geber und den Antrieb fest. Öffnen Sie dazu auf der jeweiligen Konfigurationsseite die Registerkarte "Parameter" und stellen Sie folgende Werte ein:
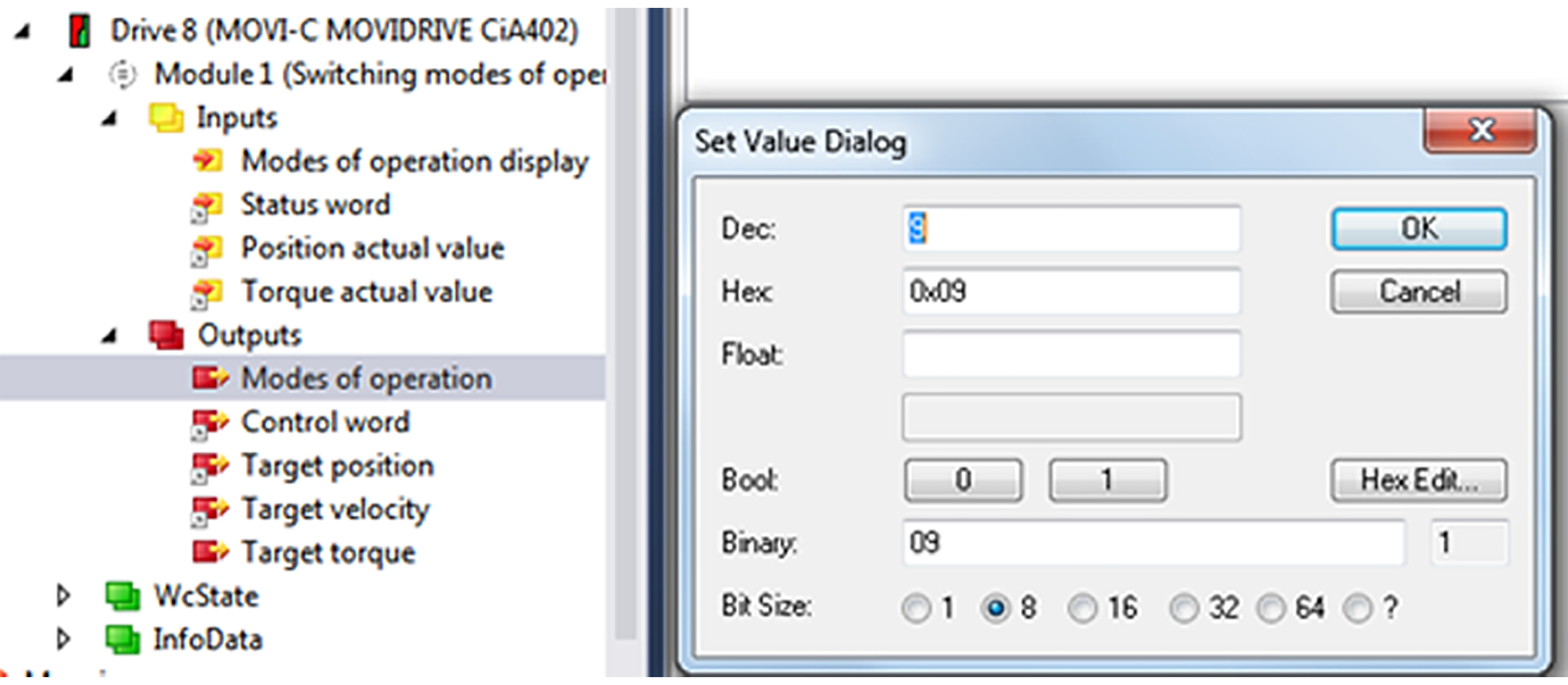
- Stellen Sie im Prozessdatenobjekt "Modes of operation" csv ein. Tragen Sie dazu den Wert "9" im Editorfenster ein.
- Stellen Sie den Bewegungsdynamik ein. Geben Sie dazu die Maximalgeschwindigkeit und die Rampen auf/ab an.
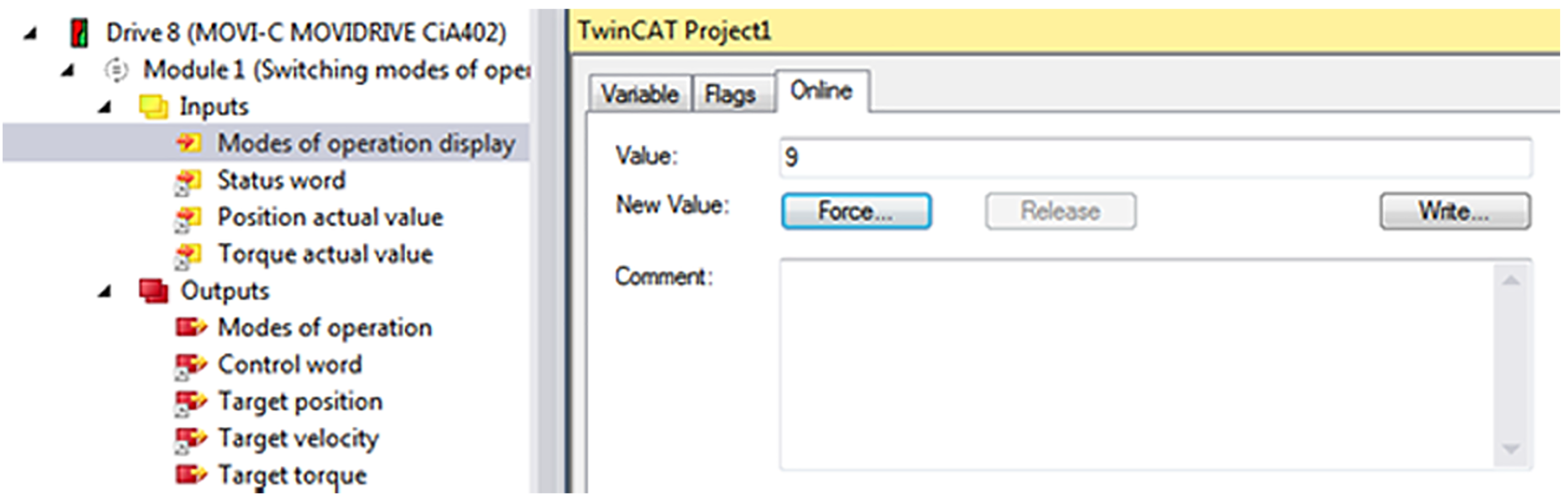
- Im Prozessdatenobjekt "Modes of operation display" wird der Wert "9" zurückgemeldet.
- Auf das Anzeige-Element des Umrichters wird den Wert "15" angezeigt.