Einbinden des Umrichters in ein EtherCAT®‑Netzwerk
Im Beispiel wird folgende Gerätetopologie verwendet:
- Übergeordnete Steuerung (SPS) CX2020 der Firma Beckhoff Automation GmbH mit EtherCAT®-Erweiterung EK1110
- Applikationsumrichter MOVIDRIVE® modular, Doppelachsmodul MDD90A (CiA402: MDDA90ACiA402)
- Applikationsumrichter MOVIDRIVE® modular, Einachsmodul MDA90A mit Sicherheitskarte MOVISAFE® CSS21A (CiA402: MDA90ACiA402)
Die folgende Abbildung ist eine schematische Darstellung der Gerätetopologie:
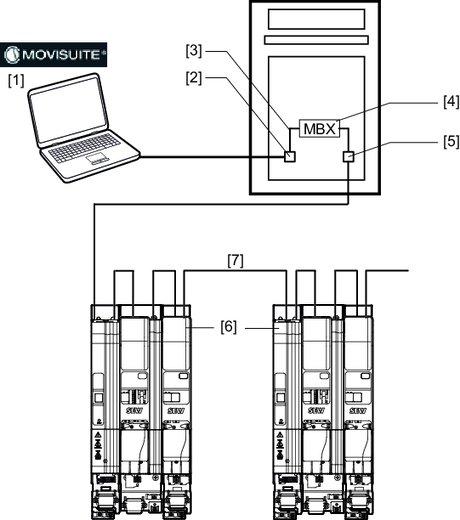
[1] | Engineering‑PC mit MOVISUITE® | [5] | EtherCAT®-Schnittstelle des EtherCAT®-Masters |
[2] | Engineering-Schnittstelle des EtherCAT®‑Masters | [6] | Umrichter von SEW-EURODRIVE |
[3] | Internes IP‑Routing | [7] | EtherCAT®/SBusPLUS-Schnittstelle der Umrichter |
[4] | Mailbox-Gateway MBX |
|
|
Zur Konfiguration und Inbetriebnahme der Geräte werden folgende Tools verwendet:
- TwinCAT 3 der Firma Beckhoff Automation GmbH für die SPS
- MOVISUITE® für die Umrichter von SEW‑EURODRIVE
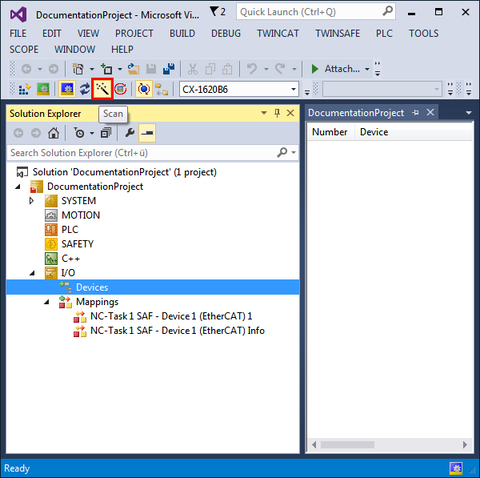
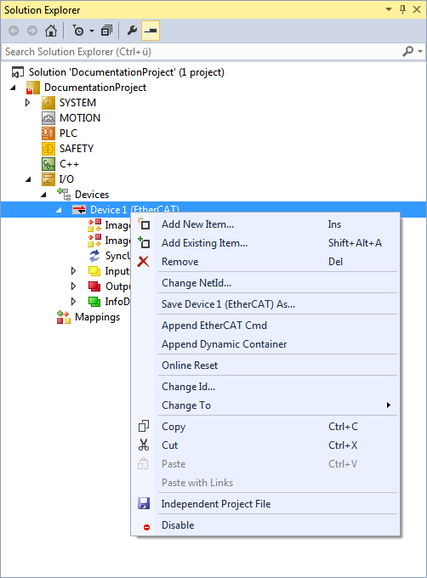
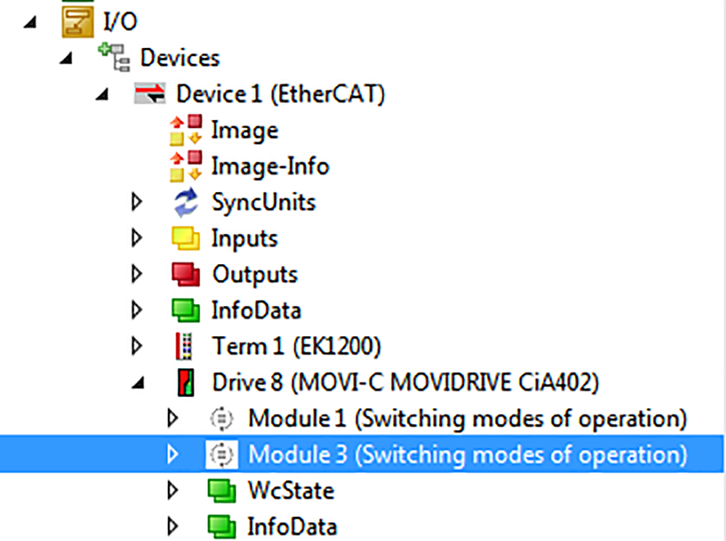
Der Umrichter muss in der I/O‑Konfiguration des EtherCAT®-Masters angelegt werden.
Weiterführende Informationen
- EtherCAT®: Umrichter durch Scannen des Netzwerks einbinden
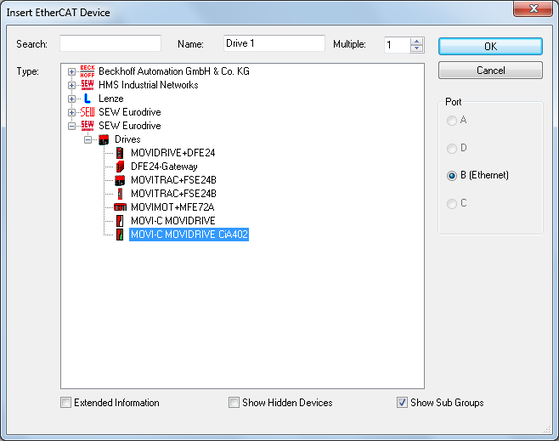
- EtherCAT®: Umrichter offline einbinden
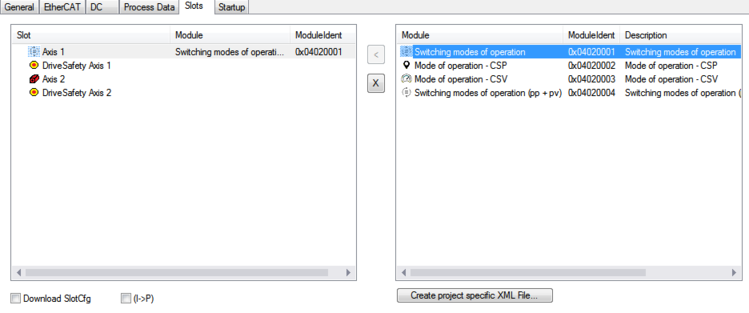
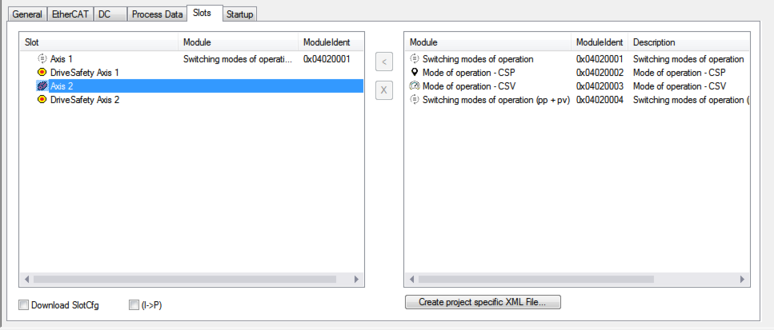
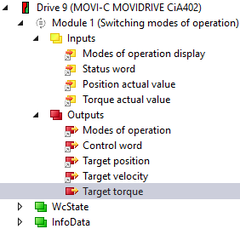
- EtherCAT®: Slot-Konfiguration anpassen, Doppelachsmodul ergänzen
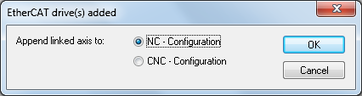
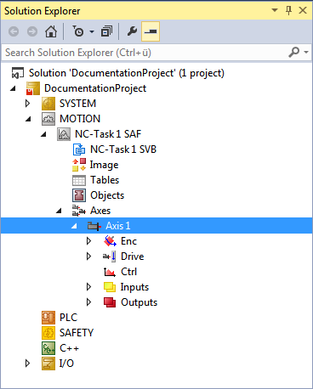
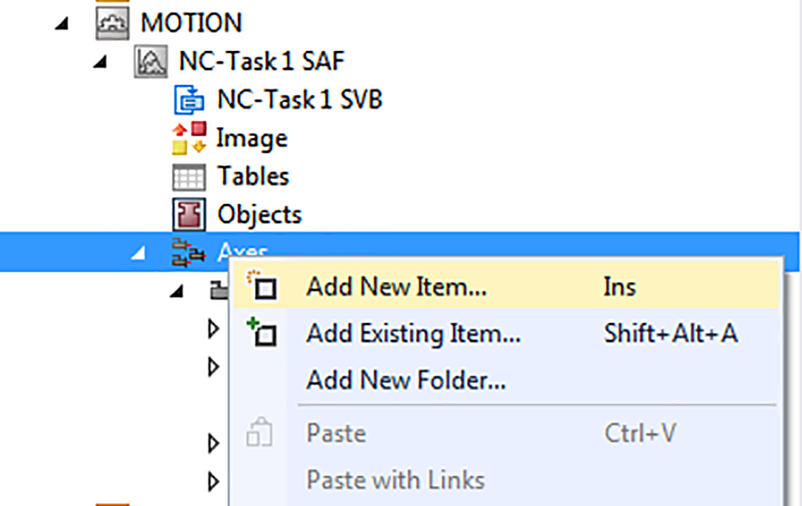
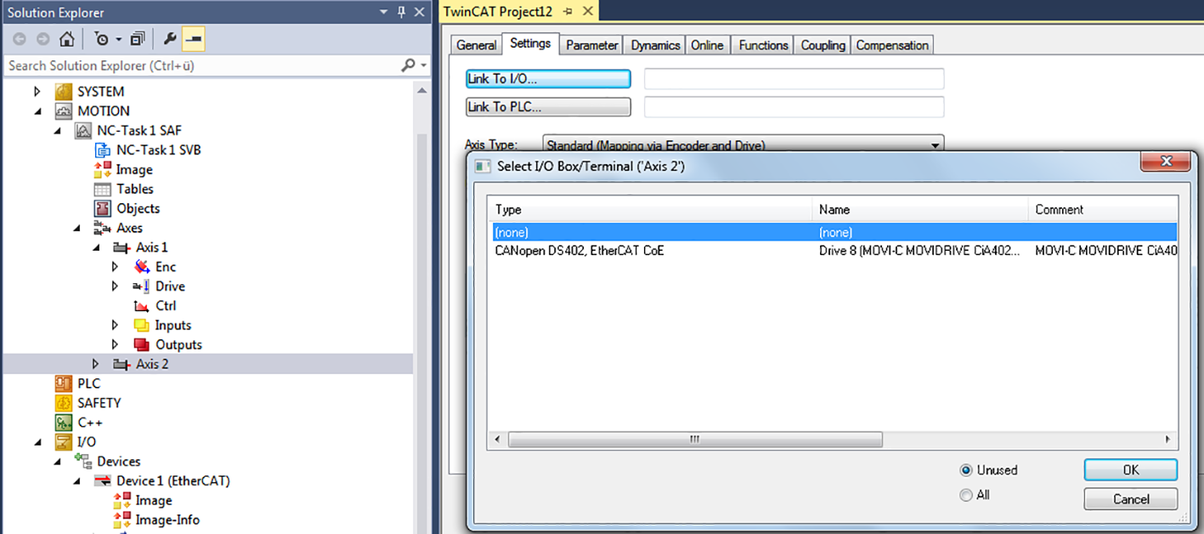
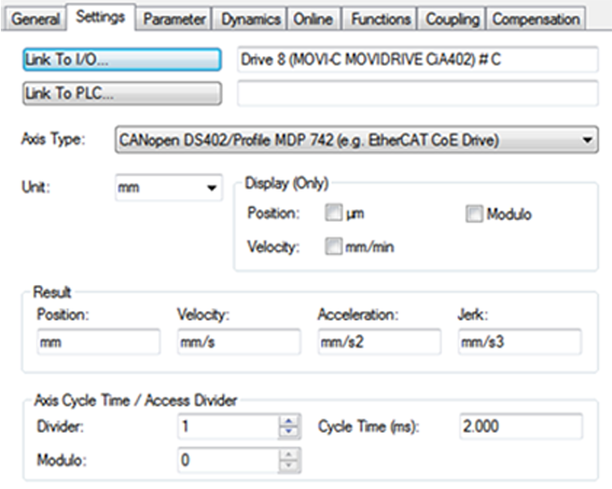
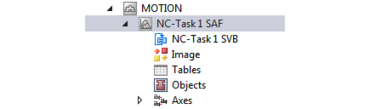
- Motion Axis: Umrichter einbinden
- Motion Axis: Doppelachsmodul verknüpfen
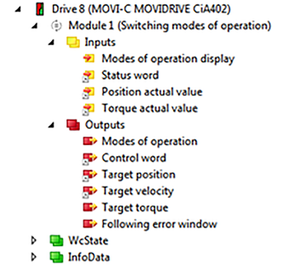
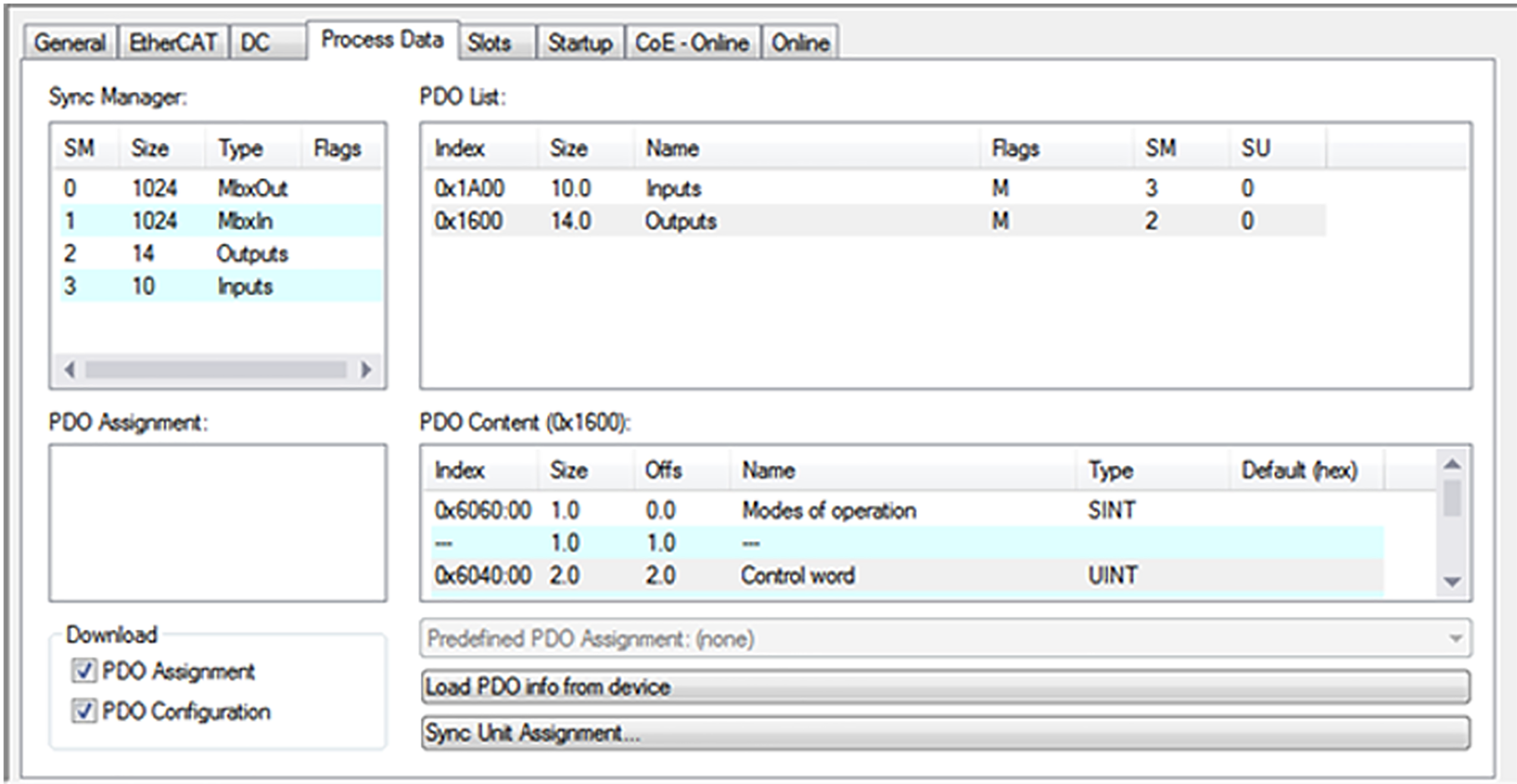
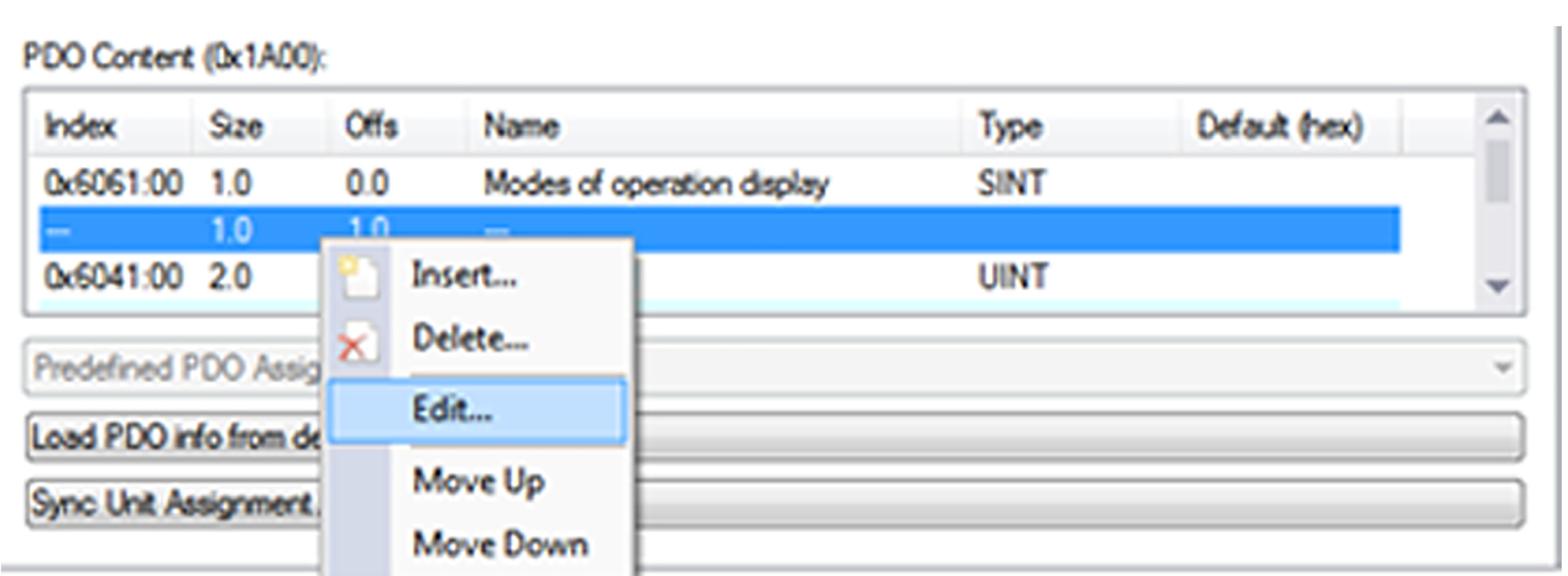
- PDO-Abbild anpassen
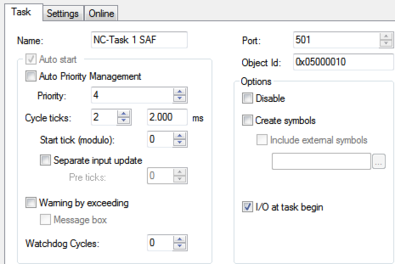
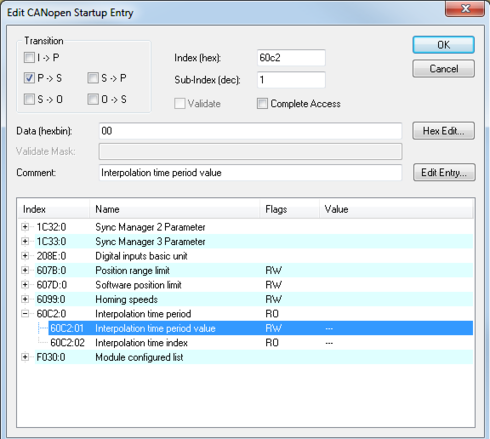
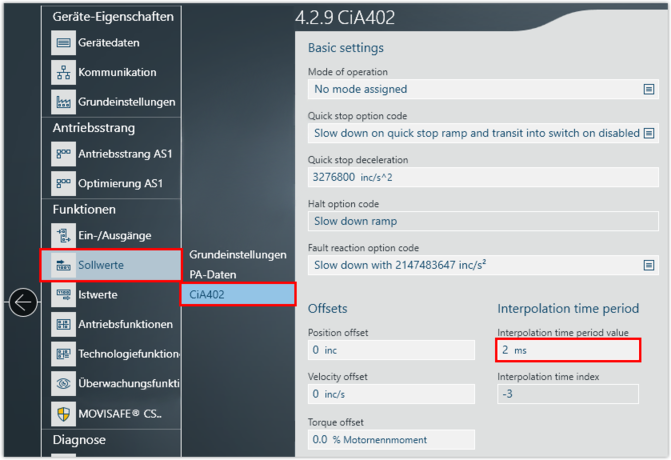
- Interpolationszeit einstellen
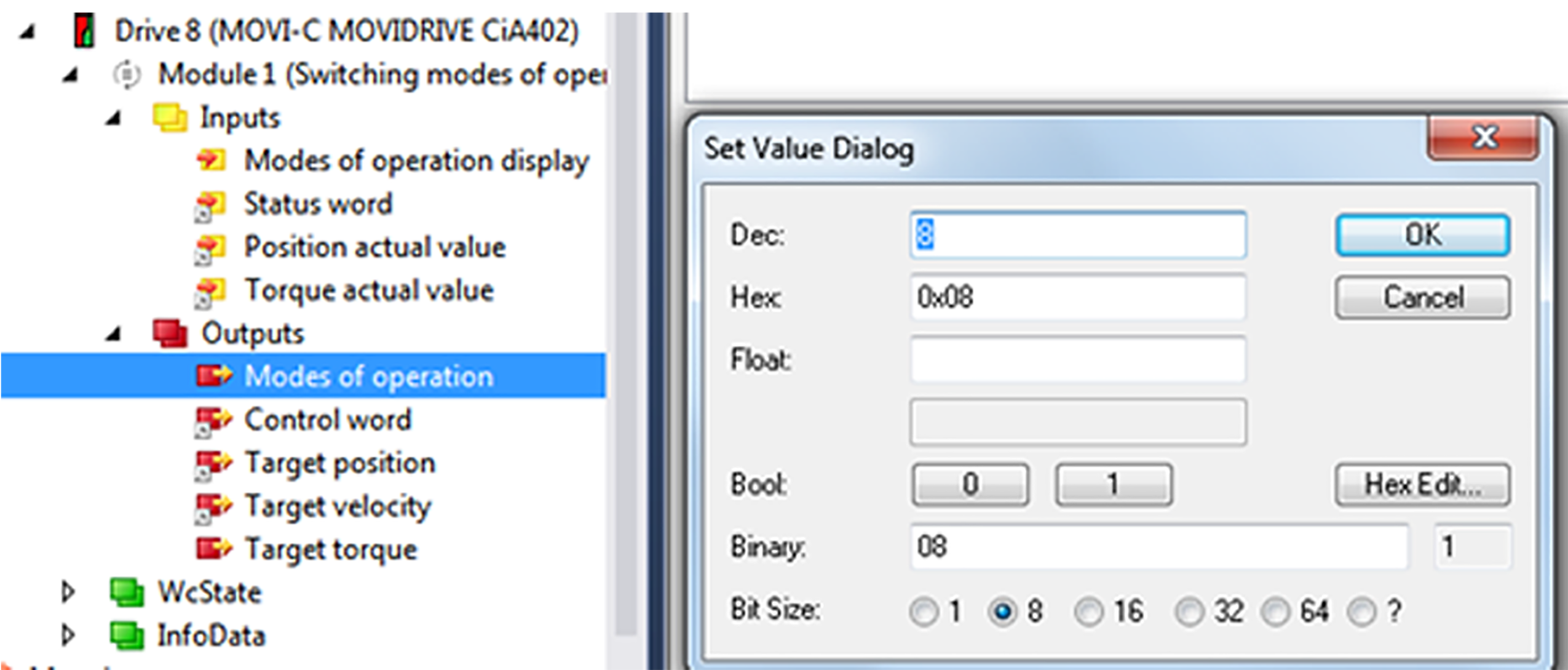
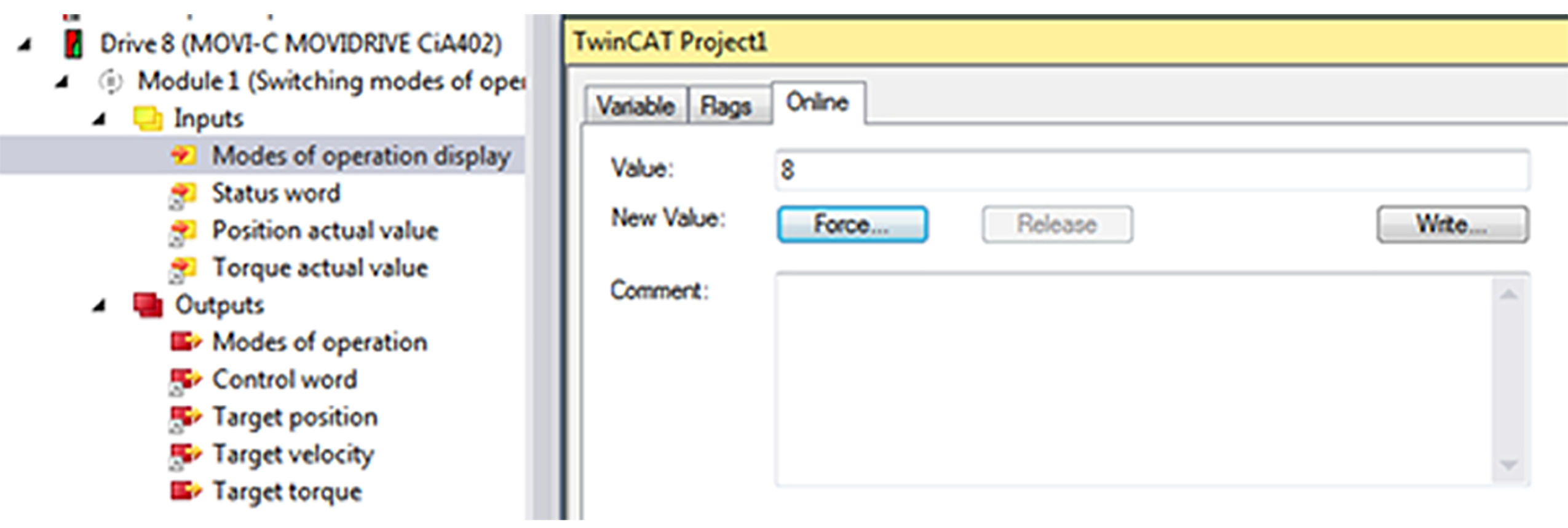
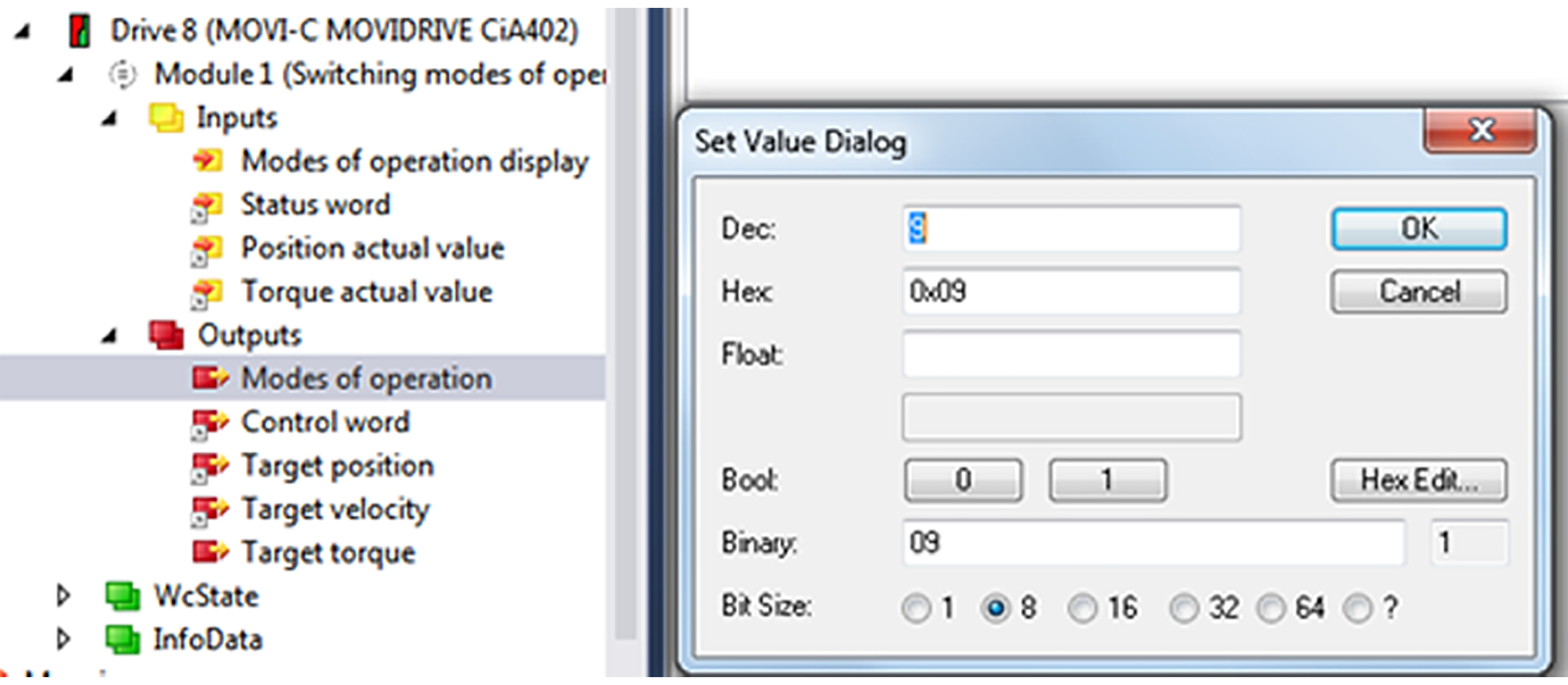
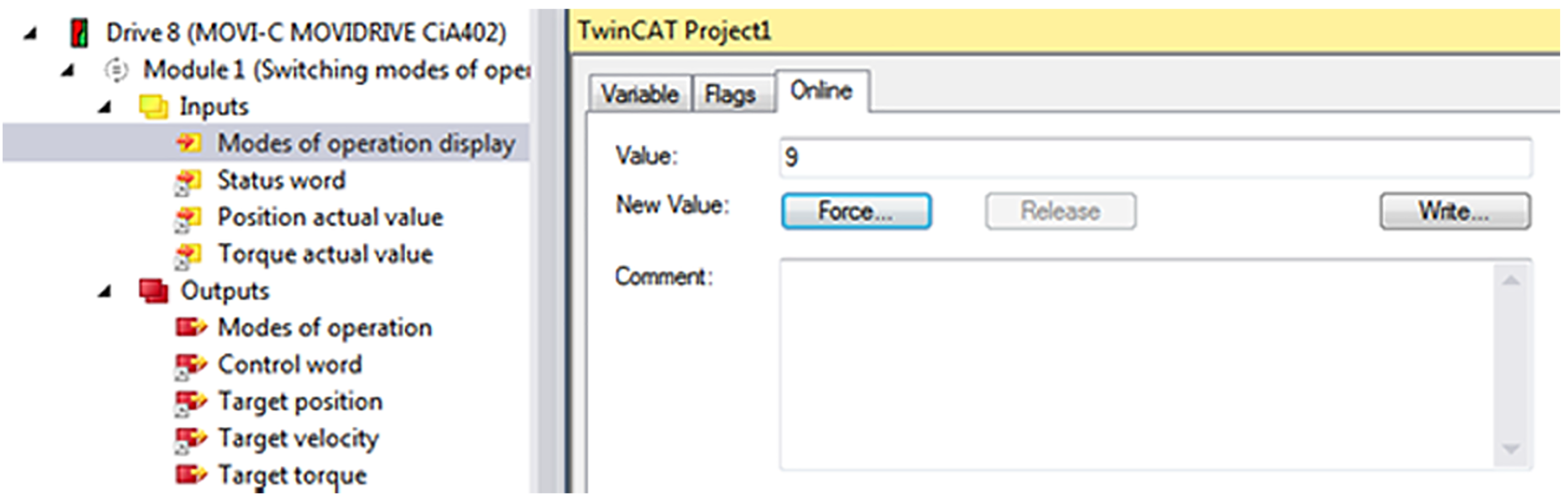
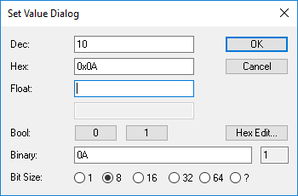
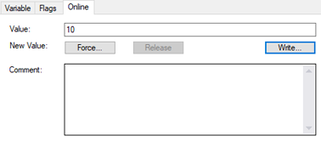
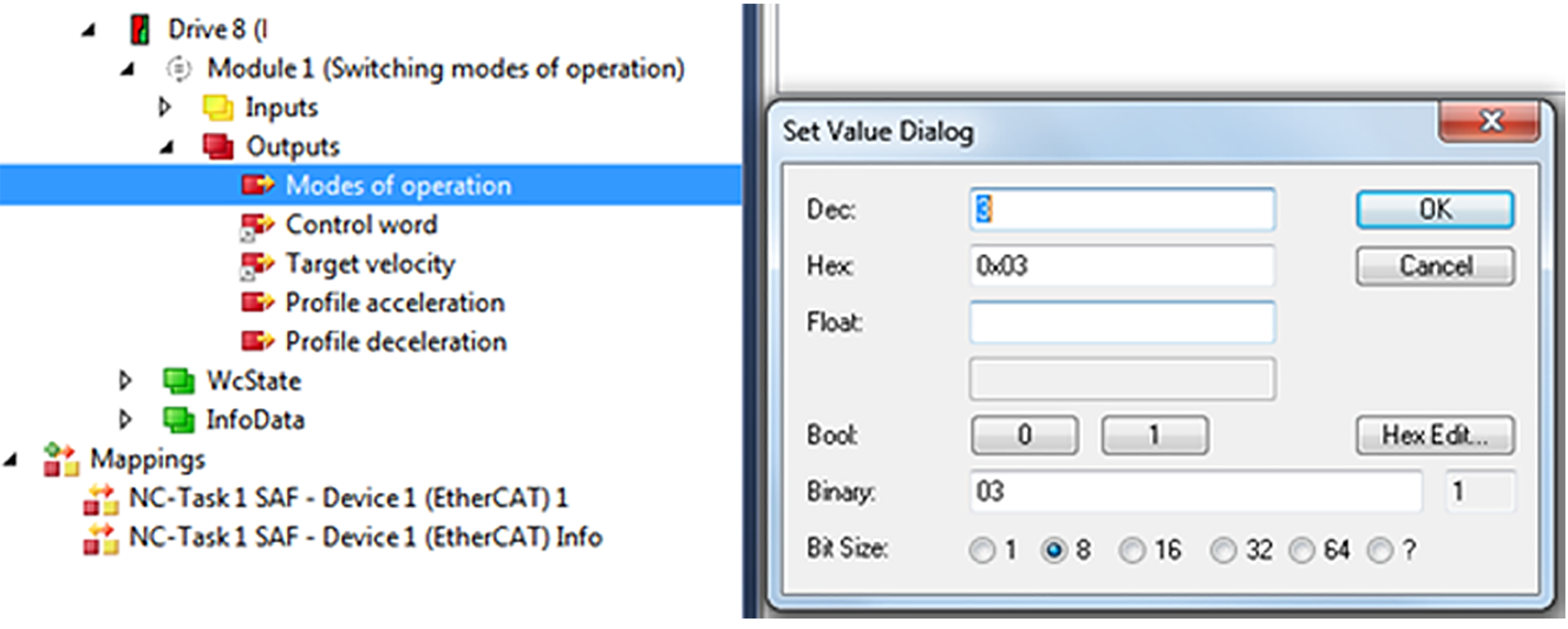
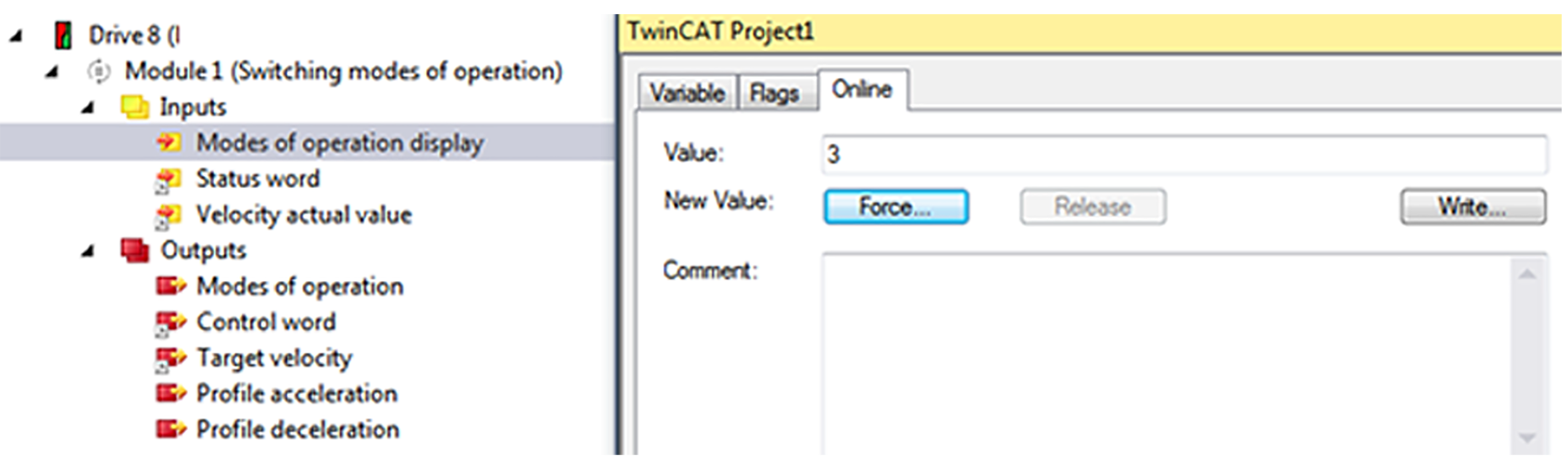
- Mode of Operation "Cyclic Synchronous Position" (csp) einstellen
- Mode of Operation "Cyclic Synchronous Velocity" (csv) einstellen
- Mode of Operation "Cyclic Synchronous Torque" (cst) einstellen
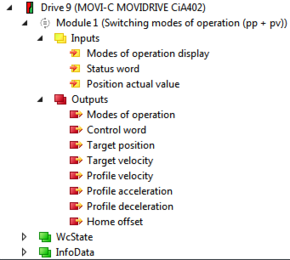
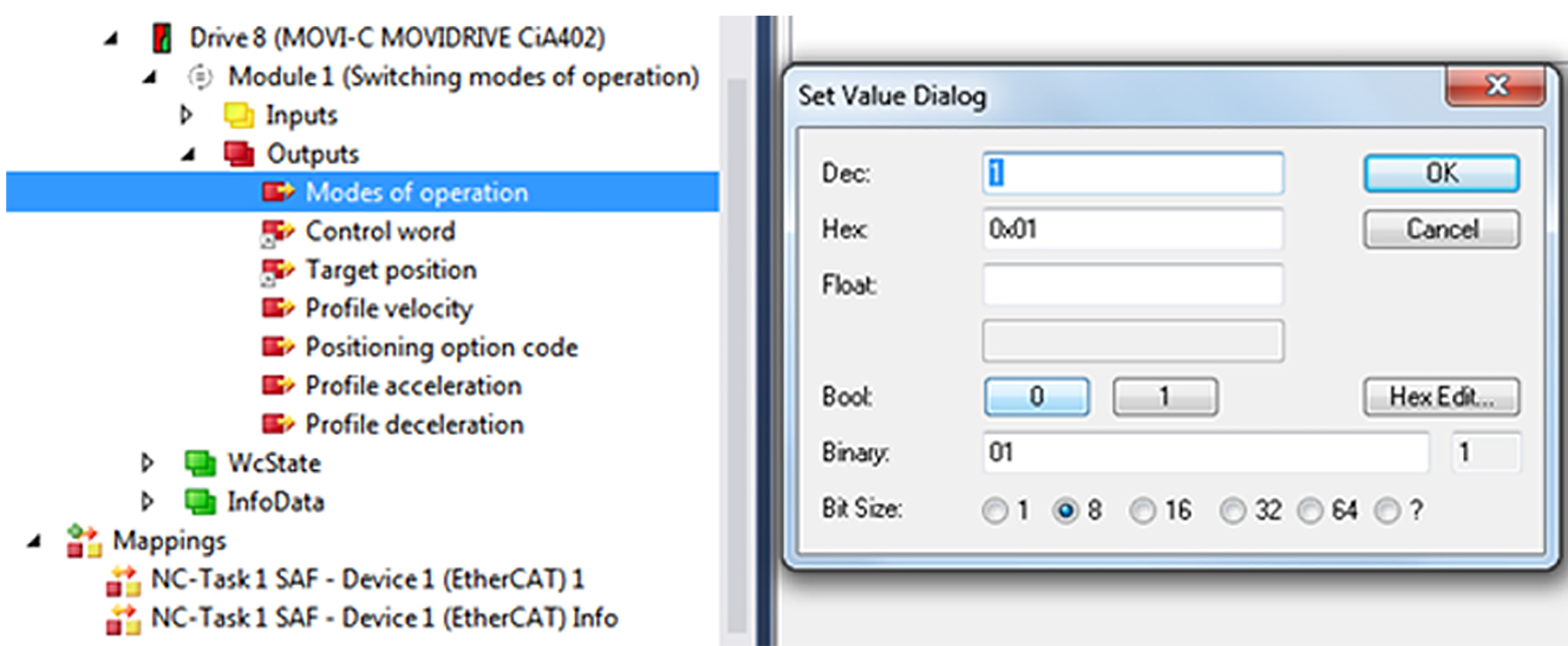
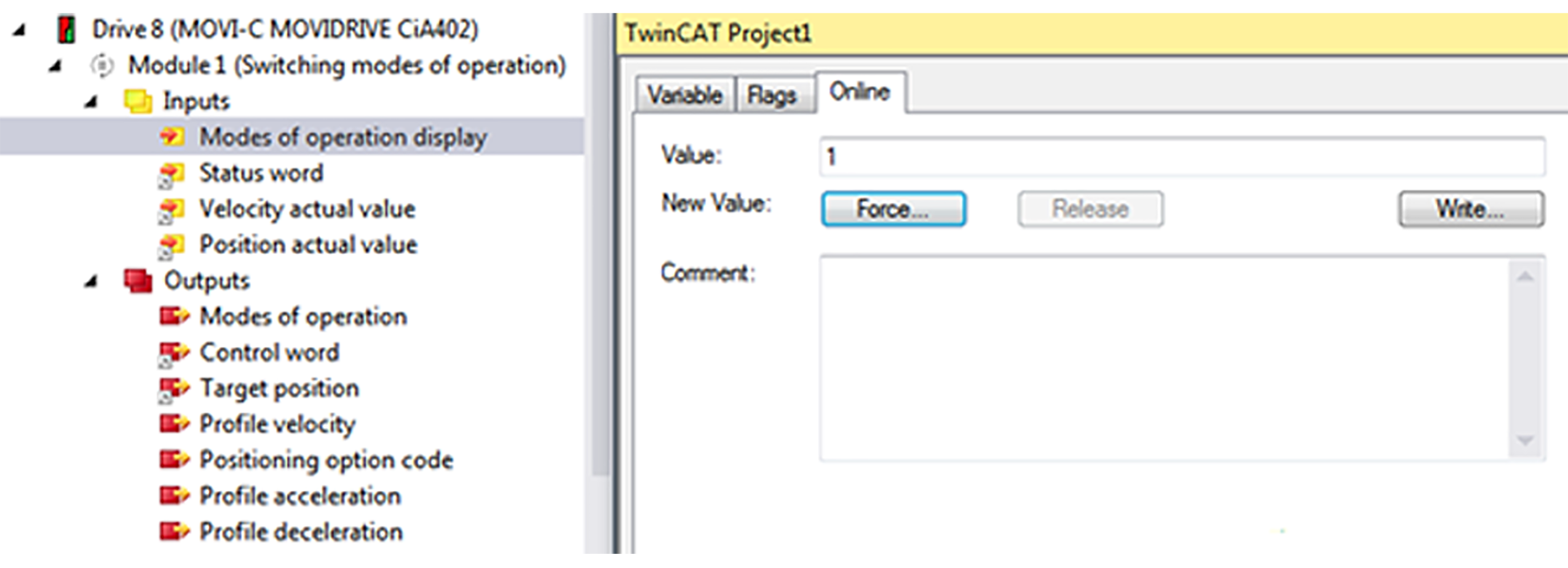
- Mode of Operation "Profile Position" (pp) einstellen
- Mode of Operation "Profile Velocity" (pv) einstellen
- Mode of Operation "Homing" (hm) verwenden