Mode of Operation "Profile Position" (pp) einstellen
Mit diesem mode of operation kann relativ oder absolut positioniert werden. Das Positionsprofil wird durch den Profilgenerator des Umrichters berechnet.
Die Geschwindigkeit wird in inc s-1, die Beschleunigung und Verzögerung werden in inc s-2 angegeben.
Das folgende Beispiel zeigt eine Umrechnung der Werte:
Größe | Wert | ||
|---|---|---|---|
Geschwindigkeit | 1800 min-1 | 30 s-1 | 1966080 inc s-1 |
Verzögerung/Beschleunigung | 2 s | 15 s-2 | 983040 inc s-2 |
Die folgende Tabelle zeigt die CiA402-Objekte, die für den mode of operation erforderlich sind oder empfohlen werden. Die Objekte müssen nicht gezwungenermaßen im zyklischen PDO-Abbild liegen.
Beachten Sie die maximale Anzahl von 8 Einträgen im zyklischen PDO-Abbild (siehe PDO-Abbild anpassen).
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Controlword | Statusword | ||
Positioning option code |
| ||
Target position | Position actual value | ||
Profile Velocity | Velocity actual value | ||
Profile Acceleration | |||
Profile Deceleration | Following error actual value (recommended) | ||
Following error window |
| ||
Following error timeout | |||
Gehen Sie folgendermaßen vor:
- Sie haben den Motor erfolgreich in Betrieb genommen.
- Sie haben den Umrichter durch Netzwerk-Scan oder offline aus dem Gerätekatalog in das TwinCAT-Projekt eingebunden, mit einer Motion-Achse verknüpft (siehe Motion Axis: Umrichter einbinden) und das entsprechende Prozessdatenobjekt in das PDO-Abbild übernommen (PDO-Abbild anpassen).
- Sie haben den Antrieb bereits referenziert. Wenn die Referenzierung (homing) erfolgreich durchgeführt wurde, wird im Statuswort (Prozessdatenobjekt "Status word") das Bit "Homing attained" gemeldet.
- Wenn Sie die PDO-Schnittstelle manuell anpassen möchten, stellen Sie die erforderlichen Prozessdatenobjekte ein.
- Die Prozessdatenobjekte in den ersten beiden Bereichen bilden die Minimalkonfiguration der PDO-Schnittstelle. Die Profilwerte für Geschwindigkeit, Beschleunigung und Verzögerung können während des Betriebs geändert werden.
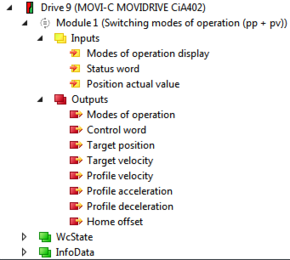
- Wenn Sie das vordefinierte Modul "Switching modes of operation (pp+pv)" verwenden möchten, wählen Sie das funktional feste Modul in der Registerkarte "Slots" (siehe Motion Axis: Umrichter einbinden).
- Diese mode of operation wird in der Regel ohne Motion-Achse verwendet. Stellen Sie die Profilwerte direkt über die PDO‑Schnittstelle ein.
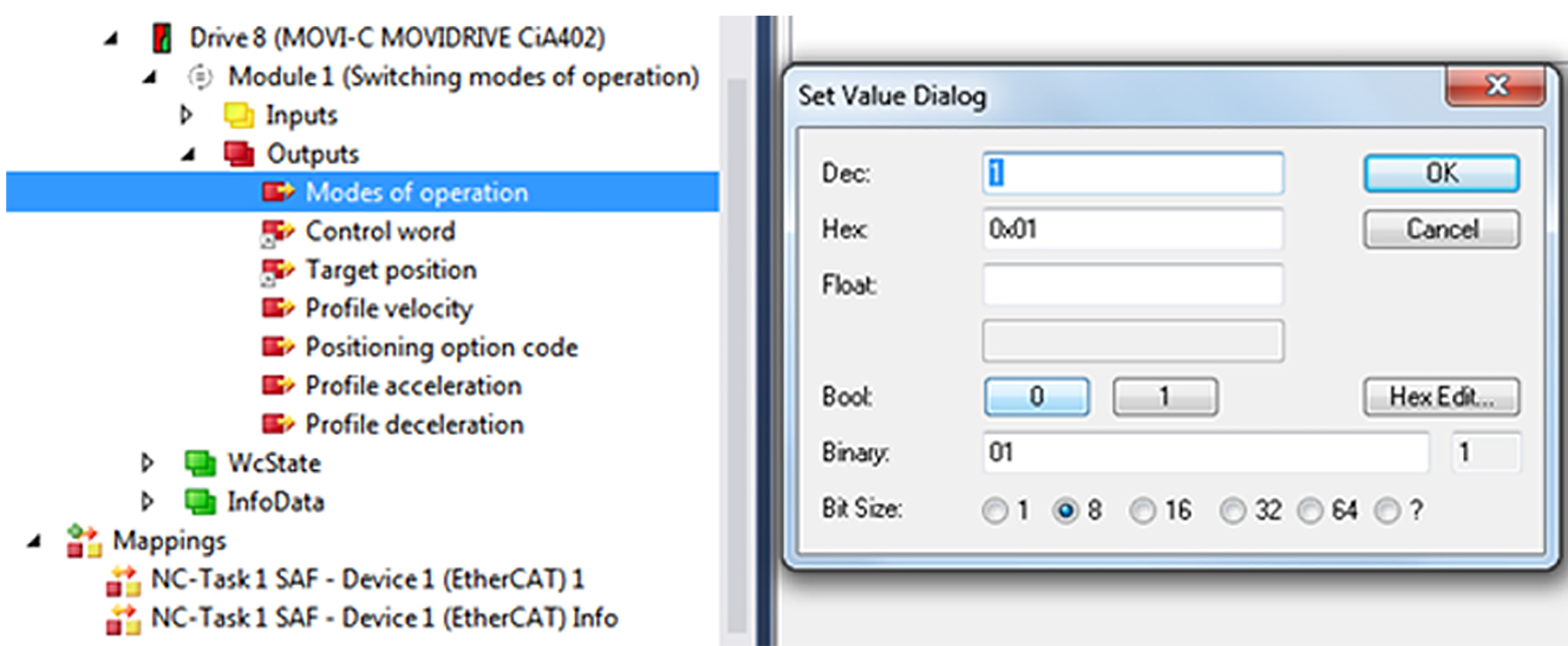
- Stellen Sie im Prozessdatenobjekt "Modes of operation" pp ein. Tragen Sie dazu den Wert "1" im Editorfenster ein.
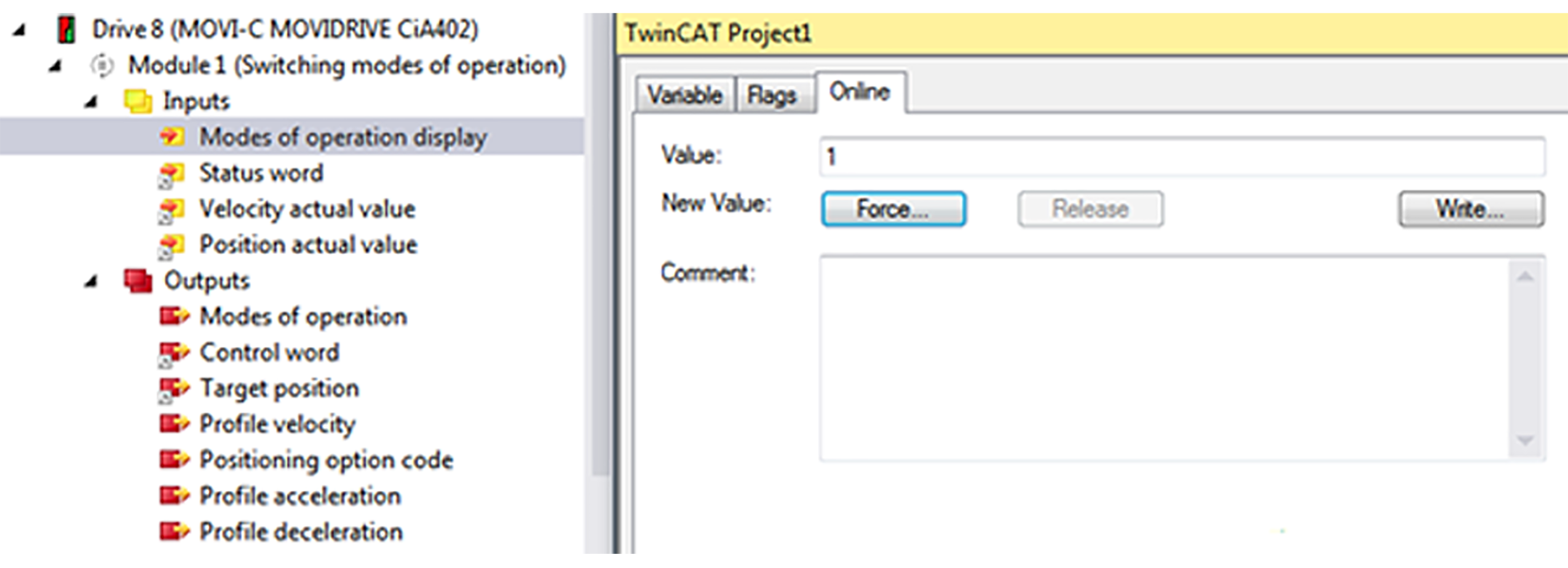
- Im Prozessdatenobjekt "Modes of operation display" wird der Wert "1" zurückgemeldet.
- Auf das Anzeige-Element des Umrichters wird den Wert "24" angezeigt.
- Wenn die Positionierung erfolgreich durchgeführt wurde, wird im Statuswort (Prozessdatenobjekt "Status word") das Bit "Targed reached" gemeldet.
- Um eine neue Position zu übernehmen, ist eine steigende Flanke auf Bit 4 des Steuerworts (Prozessdatenobjekt "Control word") erforderlich.
- Stellen Sie über das Prozessdatenobjekt "Position option code" die Positionierart ein. Diese Einstellung ist nur dann aktiv, wenn die Steuerbits 5 und 6 des Steuerworts entsprechend belegt sind.
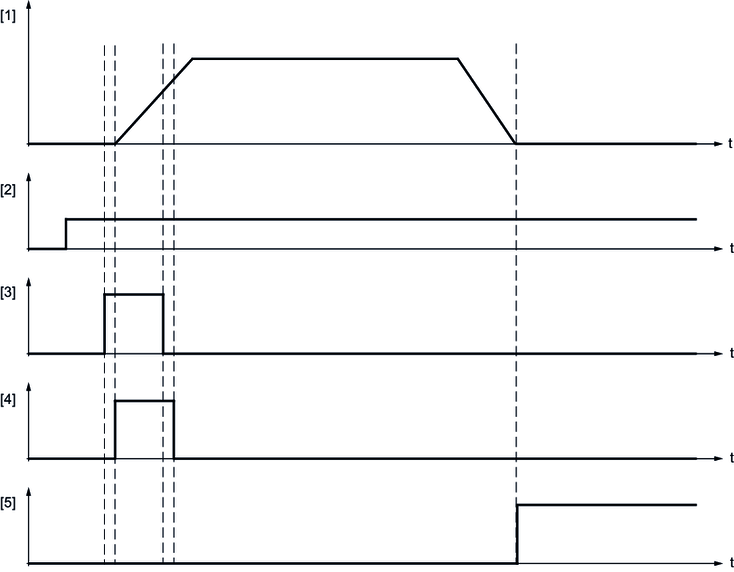
[1] | Istgeschwindigkeit |
[2] | Sollwert Zielposition |
[3] | Steuerwort: Neuer Sollwert (Bit 4) |
[4] | Steuerwort: Sollwertübernahme (Bit 12) |
[5] | Statustwort: Zielposition erreicht (Bit 10) |
Bit 6 | Bit 5 | Definition |
|---|---|---|
0 | 0 | Normale Positionierung Vergleichbar mit der Positionierung der linearen Achse. Wenn die Positioniergrenzen "Min position range limit" (Objekt 0x607B:2) und "Max position range limit" (Objekt 0x607B:1) erreicht werden, stellt sich der Sollwert automatisch auf die andere Seite der Grenze ein. Die Positionierung kann sowohl relativ als auch absolut sein.Eine Positionierung über die Modulo-Grenzwerten hinaus, ist nur mit dieser Bitkombination möglich. |
0 | 1 | Positionierung nur in negative Bewegungsrichtung Wenn die Sollposition größer als die Istposition ist, fährt der Antrieb über die Positioniergrenze "Min position limit" (Objekt 0x607B:1) zur Sollposition. |
1 | 0 | Positionierung nur in positive Bewegungsrichtung Wenn die Sollposition kleiner als die Istposition ist, fährt der Antrieb über die Positioniergrenze "Max position limit" (Objekt 0x607B:2) zur Sollposition. |
1 | 1 | Positionierung auf kürzestem Weg zur Sollposition Die Drehrichtung des Antriebs wird so festgelegt, dass sich beim Positionieren zwischen der Istposition und der aktuellen Sollposition der kürzeste Weg ergibt. HINWEIS: Wenn der Abstand zwischen Istposition und Sollposition in einem 360°‑System 180° ist, fährt der Antrieb in die positive Richtung. |
- Tragen Sie dazu folgende Werte im Editorfenster des Prozessdatenobjekts "Position option code" ein.
Position option code | Wert |
|---|---|
Normale Positionierung | 0 |
Nur in negative Richtung | 64 |
Nur in positive Richtung | 128 |
Kürzester Weg | 192 |
