Ajustar o modo de operação "Profile Position" (pp)
Este modo de operação pode ser usado para posicionamento relativo ou absoluto. O perfil de posição é calculado pelo gerador de perfil do conversor.
A velocidade está em inc s-1, a aceleração e a desaceleração estão em inc s-2.
O exemplo a seguir mostra uma conversão dos valores:
Tamanho | Valor | ||
|---|---|---|---|
Velocidade | 1800 min-1 | 30 s-1 | 1966080 inc s-1 |
Desaceleração/aceleração | 2 s | 15 s-2 | 983040 inc s-2 |
A tabela a seguir mostra os objetos CiA402 necessários ou recomendados para o modo de operação. Os objetos não precisam necessariamente estar na imagem PDO cíclica.
Observar o número máximo de 8 entradas na imagem PDO cíclica (consultar Ajustar imagem PDO).
Control | Feedback | ||
|---|---|---|---|
Mode of operation | Mode of operation display | ||
Controlword | Statusword | ||
Positioning option code |
| ||
Target position | Position actual value | ||
Profile Velocity | Velocity actual value | ||
Profile Acceleration | |||
Profile Deceleration | Following error actual value (recommended) | ||
Following error window |
| ||
Following error timeout | |||
Proceda da seguinte forma:
- Você colocou o motor em operação com sucesso.
- Você integrou o conversor no projeto TwinCAT por meio de uma varredura de rede ou off-line a partir do catálogo de unidades, vinculou-o a um eixo de movimento (ver Motion Axis: integrar conversor) e transferiu o objeto de dados de processo correspondente para a imagem PDO (Ajustar imagem PDO).
- Você já fez referência à unidade. Se o referenciamento (homing) foi realizado com sucesso, o bit "Homing attained" (Referenciamento alcançado) é relatado na palavra de estado (objeto de dados de processo "Status word").
- Se você deseja ajustar a interface PDO manualmente, defina os objetos de dados de processo necessários.
- Os objetos de dados de processo nos dois primeiros campos formam a configuração mínima da interface PDO. Os valores de perfil para velocidade, aceleração e desaceleração podem ser alterados durante a operação.
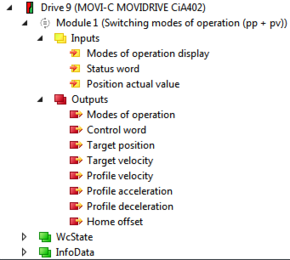
- Se você deseja usar o módulo predefinido "Switching modes of operation (pp+pv)", selecione o módulo fixo funcional na aba "Slots" (ver Motion Axis: integrar conversor).
- Este modo de operação geralmente é usado sem eixo de movimento. Definir os valores do perfil diretamente através da interface PDO.
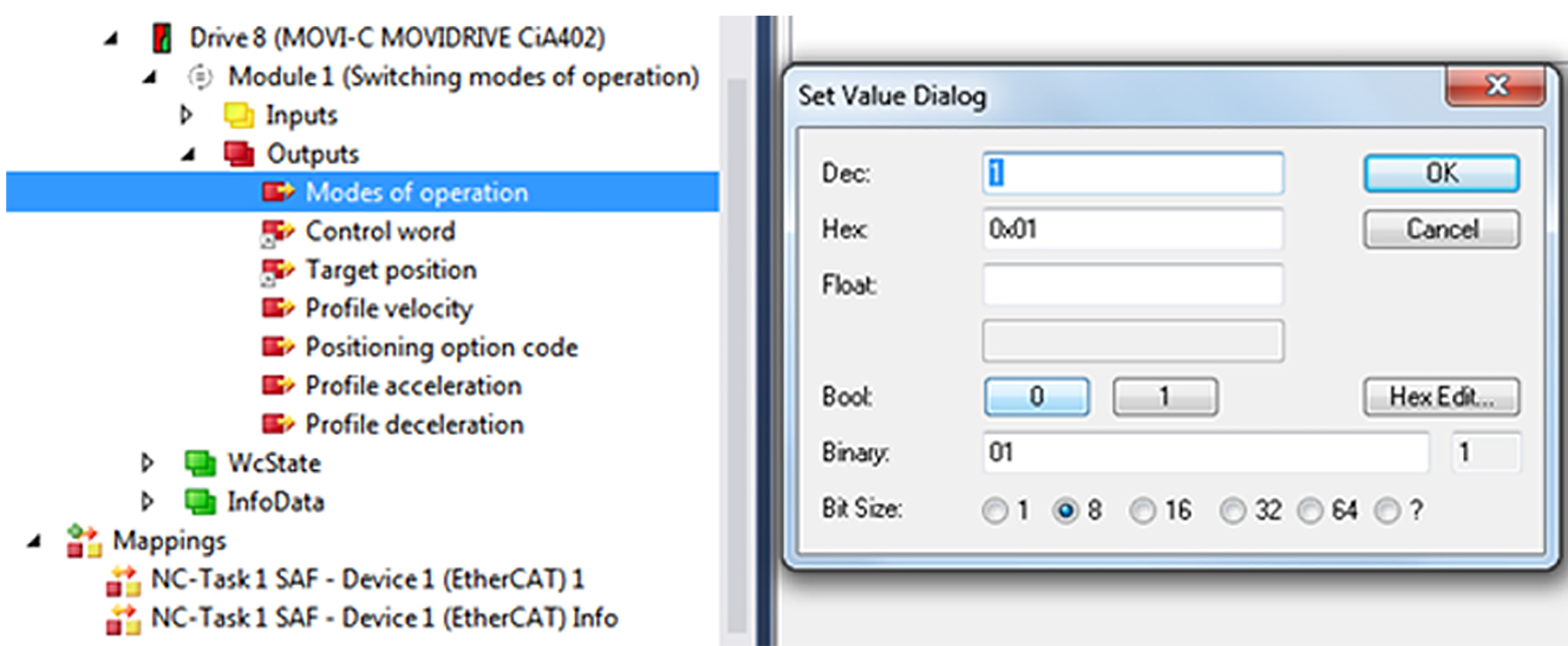
- Ajustar pp no objeto de dados de processo "Modes of operation" (Modos de operação). Para isso, inserir o valor "1" na janela do editor.
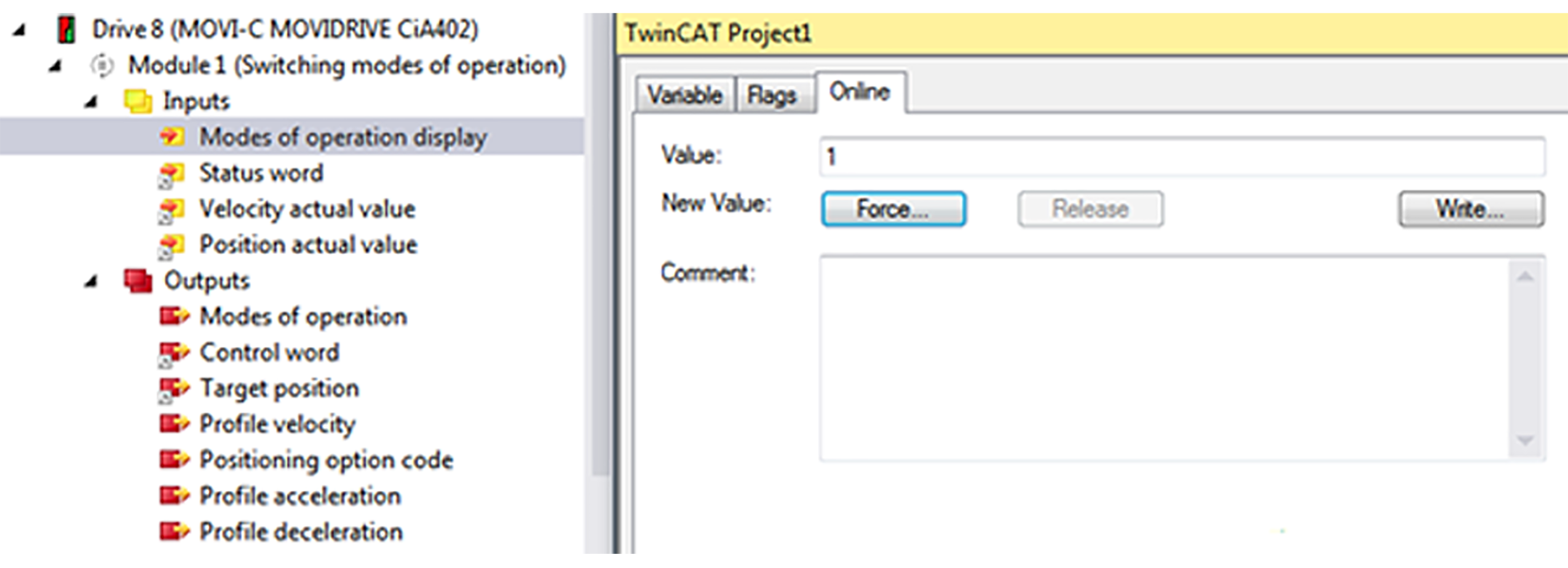
- O valor "1" é reportado no objeto de dados de processo "Modes of operation display" (Indicação dos modos de operação).
- O valor "24" é exibido no elemento de indicação do conversor.
- Se o posicionamento foi realizado com sucesso, o bit "Targed reached" (Alvo alcançado) é relatado na palavra de estado (objeto de dados de processo "Status word").
- Para assumir uma nova posição, é necessário um flanco ascendente no bit 4 da palavra de comando (objeto de dados de processo "Control word").
- Definir o tipo de posicionamento através do objeto de dados de processo "Position option code" (Código de opção de posição). Esta configuração só está ativa se os bits de controle 5 e 6 da palavra de controle forem atribuídos de acordo.
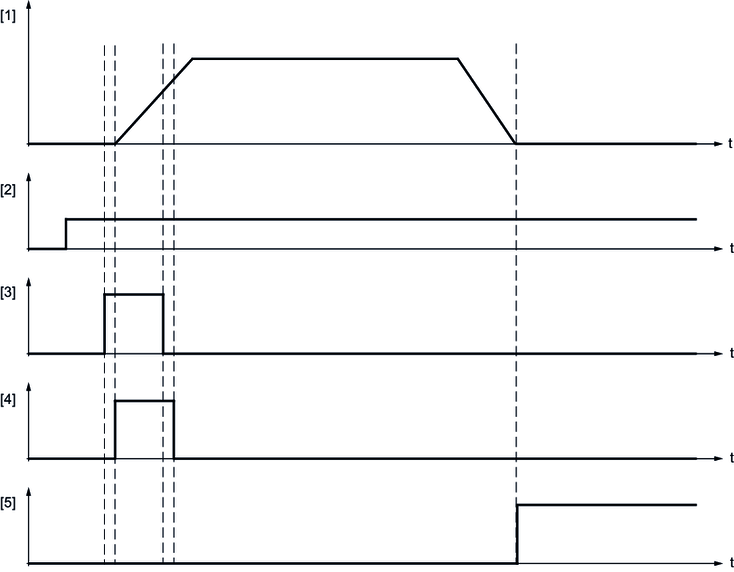
[1] | Velocidade real |
[2] | Valor nominal da posição final |
[3] | Palavra de comando: novo valor nominal (Bit 4) |
[4] | Palavra de comando: aceitação do ponto de ajuste (Bit 12) |
[5] | Palavra de estado: posição final atingida (Bit 10) |
Bit 6 | Bit 5 | Definição |
|---|---|---|
0 | 0 | Posicionamento normal Comparável com o posicionamento do eixo linear. Quando os limites de posicionamento "Min position range limit" (Limite de faixa de posição mín.) (objeto 0x607B:2) e "Max position range limit" (Limite de faixa de posição máx.) (objeto 0x607B:1) são atingidos, o valor nominal se ajusta automaticamente para o outro lado do limite. O posicionamento pode ser tanto relativo quanto absoluto. O posicionamento além dos valores máximos do módulo é possível somente com esta combinação de bits. |
0 | 1 | Posicionamento apenas na direção negativa do movimento Se a posição nominal for maior que a posição atual, o acionamento se move para a posição nominal através do limite de posicionamento "Min position limit" (objeto 0x607B:1). |
1 | 0 | Posicionamento apenas na direção positiva do movimento Se a posição nominal for menor que a posição atual, o acionamento se move para a posição nominal através do limite de posicionamento "Max position limit" (objeto 0x607B:2). |
1 | 1 | Posicionamento no caminho mais curto para a posição final O sentido de rotação do acionamento é determinado de forma que o caminho mais curto resulte no posicionamento entre a posição atual e a posição nominal atual. INFORMAÇÃO: se a distância entre a posição atual e a posição nominal for de 180° em um sistema de 360°, o acionamento se move na direção positiva. |
- Para isso, inserir os seguintes valores na janela do editor do objeto de dados de processo "Position option code" (Código de opção de posição).
Position option code | Valor |
|---|---|
Posicionamento normal | 0 |
Apenas em uma direção negativa | 64 |
Apenas em uma direção positiva | 128 |
Caminho mais curto | 192 |
